本文主要关于深蓝学院系列课程——基于图像的三维重建的笔记。
课程链接 基于图像的三维重建
1、单视几何
1.1、无穷远点、无穷远线与无穷远面
无穷远点: 空间中平行线的交点。
无穷远线: 平行平面在无穷远处交于一条公共线。
无穷远面: 两条或多条无穷远直线的集合。
表示: 无穷远点与无穷远面表示如下(三维空间无穷远线较难表示,一般是两个平面的交线表示):
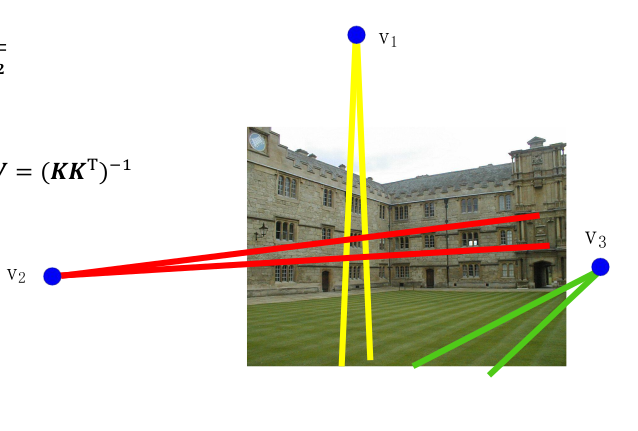
1.2、隐消点和隐消线
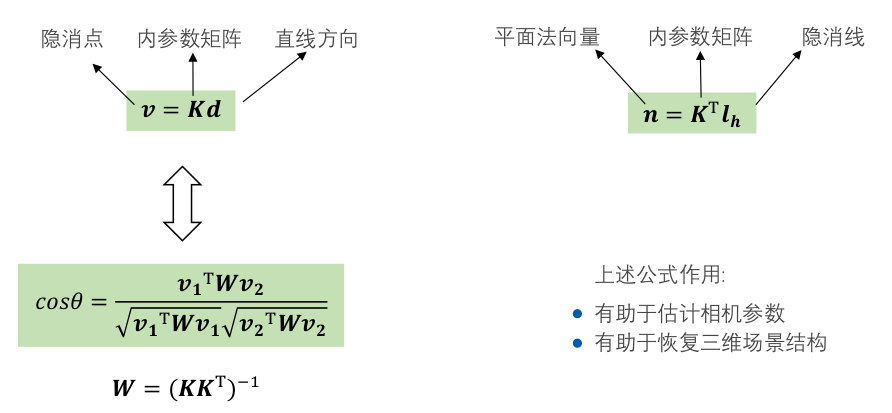
隐消点: 三维空间中无穷远点在图像平面上的投影点,其与直线方向满足如下关系:其中 $v$ 为隐消点, $d$ 为直线方向, $K$ 为相机投影矩阵。
2D平面上的直线变换: 已知:直线 $l$ 和变换矩阵 $H$ ,求解变换后的直线 $l’$ :
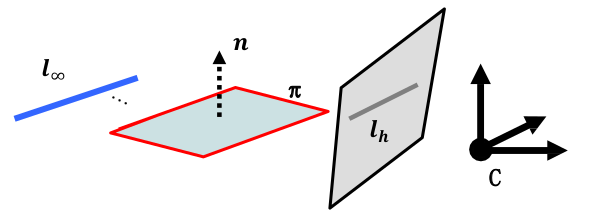
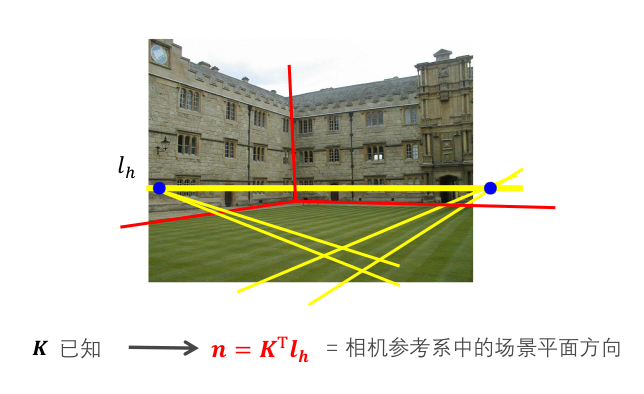
隐消线与平面法向量: 识别隐消线有助于重构。**图像中两条直线如果消失在隐消线上,则这两条线是3D空间中的平行线。
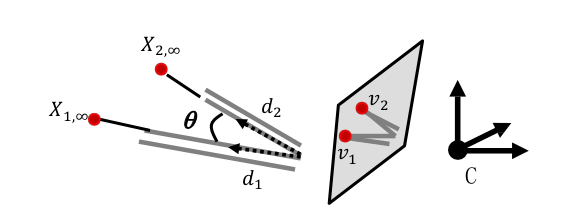
两组平行线的夹角与隐消点:
$W$ 的性质:
- $\boldsymbol{W}=\begin{pmatrix}W_1&W_2&W_4\\W_2&W_3&W_5\\W_4&W_5&W_6\end{pmatrix}$ 对称;
- $W_2 = 0$ 为零倾斜投影;
- $W_2=0; W_1 = W_3$ ,相机为方形像素;
- $W$ 仅 5个 自由度。
总结:
1.3、单视图标定
两个假设: 零倾斜;正方形像素。可以得到两个内参。
三个消隐点: 根据 两两垂直 的消隐点得到三条方程,求解剩下的内参:
重构场景平面方向:
单视图重构缺陷: 场景的实际比例无法复制。
2、三维重建基础与极几何
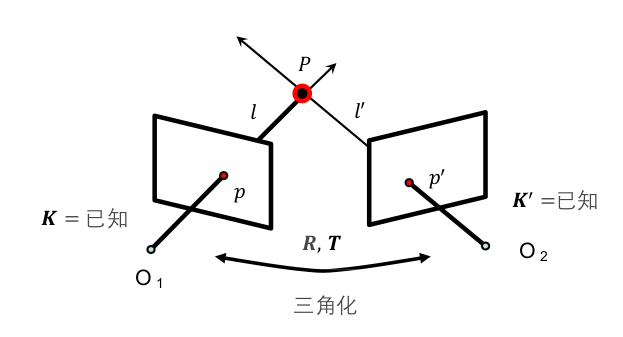
2.1、三维重建基础
三角化求解问题: 已知: $p,p’,K,K’,R,T$ ,求解:$P$ 点的三维坐标?
- 线性求解:找到对应点对构建方程组求解。
方程数 4 个,未知参数 3 个,构成超定齐次线性方程组,采用最小二乘解:
1. 对 $A$ 进行奇异值分解 $A=UDV^T$ ;
2. $P$ 为 $V$ 矩阵的最后一列。
- 非线性解法: 寻找 $P$ 最小化能量函数 $d(p,MP)+d(p’,M’P)$ ,采用牛顿法或L-M方法。
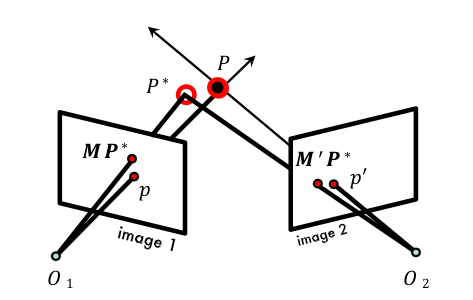
实际应用中存在的问题: 由于噪声存在,通常两条直线不相交,且线性、非线性方法都需要知道内参矩阵以及变换矩阵。
- 问题1: 已知 $p,p’$ ,相机内参 $K,K’$ 。求解:相机间的 $R,T$ 以及 $P$ 的三维坐标?
- 问题2: 已知 $p,p’$ 。求解:相机内参 $K,K’$ ,相机间的 $R,T$ 以及 $P$ 的三维坐标?
多视图几何的关键问题:
- 相机几何:从一张或多张图像求解相机内、外参数;
- 场景几何:通过两至多幅图寻找3D场景坐标;
- 对应关系:已知一个图像中的 $p$ 点,如何在另一个图像中找到 $p’$ 点。
2.2、极几何与基础矩阵
极几何: 描述了同一场景或者物体的两个视点图像间的几何关系。
- 概念:
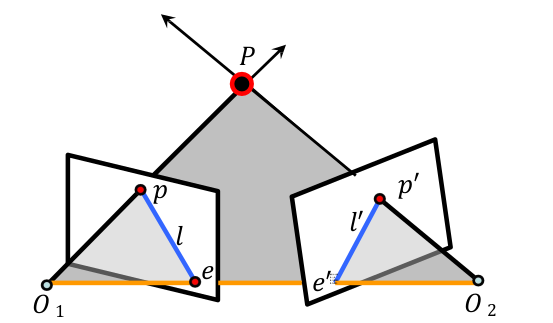
- 极平面:过点 $P,O_1,O_2$ 的平面;
- 基线: $O_1,O_2$ 的连线;
- 极线: 极平面与成像平面的交线;
- 极点: 基线与成像平面的交点。
- 性质:
- 极平面相交于基线;
- 极线相交于极点;
- $p(p’)$ 的对应点在极线 $l’(l)$ 上。
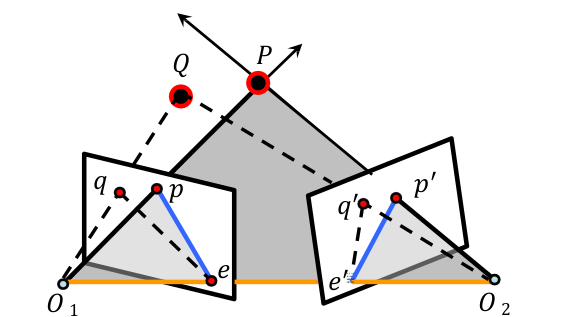
- 作用:将搜索范围缩小到对应的极线上。
本质矩阵: 对 规范化相机 拍摄的两个视点图像间的极几何关系进行 代数描述。
- 推导:
- $p’,O_2$ 在 $O_1$ 的坐标分别为:$R^{\mathrm{T}}p^{^{\prime}}-R^{\mathrm{T}}T$ , $-R^TT$;
- 上述两个向量的差乘垂直于极平面:$R^\mathrm{T}T\times(R^\mathrm{T}p^{\prime}-R^\mathrm{T}T)=R^\mathrm{T}T\times R^\mathrm{T}p^{\prime} = 0$ ;
- 整理可得 $p^{\prime\text{T}} ( T \times R ) p = 0$ ;
- 对上式进行整理:令 $E=T\times R=[T_\times]R$ ,$E$ 称为本质矩阵。即:$p’^TEp=0$ .
- 性质:
- $p(p’)$ 对应的极线是 $l’(l’=Ep)(l(l=E^Tp’))$ ;
- $Ee = 0$ 与 $e’^TE=0$ ;
- $E$ 是奇异的(秩为2);
- $E$ 有 5个自由度 (三个旋转,三个平移,$det(E) = 0$ 去掉一个自由度)。
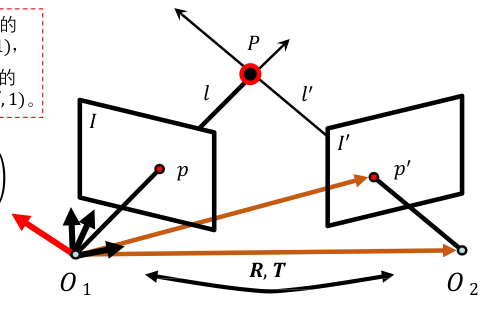
基础矩阵: 对 一般的透视相机 拍摄的两个视点图像间的极几何关系进行 代数描述 。
推导:参考本质矩阵推导。构建规范化相机模型。
- $F={K^{\prime}}^{-\mathrm{T}}[T_{\times}]RK^{-1}$
性质:
- $p(p’)$ 对应的极线是 $l’(l’=Fp)(l(l=F^Tp’))$ ;
- $Fe = 0$ 与 $e’^TF=0$ ;
- $F$ 是奇异的(秩为2);
- $F$ 有 7个自由度 (尺度无法确定,$det(E) = 0$ 去掉一个自由度)。
自由度问题: 参考:为什么本质矩阵5自由度,基础矩阵7自由度,单应矩阵8自由度?
2.3、基础矩阵估计
8点法: $F$ 共7个自由度,理论上7个点即可,但计算方法比较复杂。
求解:
- 构建齐次系统 $Wf=0$ ;
- 通常选取点对 $N>8$ ,构建最小二乘解,进行 SVD 分解求得 $\hat{F}$ 。$W$ 为点对矩阵,$f$ 为待求 $F$ 矩阵的向量形式, $f$ 为 $W$ 矩阵最小奇异值的右奇异向量,且 $|f|=1$
$\hat{F}$ 并非我们所要求的基础矩阵:
- 原因:基础矩阵秩为 2, $\hat{F}$ 秩通常为3,即满秩。
- 解决:寻找 $F$ 最小化 $|F-\hat{F}|_F \quad s.t.det(F)=0$.
八点法: 步骤如下:
- 构建 $W$ 矩阵;
- 对 $W$ 矩阵进行奇异值分解求 $\hat{F}$ ;
- 执行秩为 2 的约束求 $F$ ,即式(10)。
八点法缺陷: 精度较低, $W$ 矩阵中各个元素的数值差异过大。
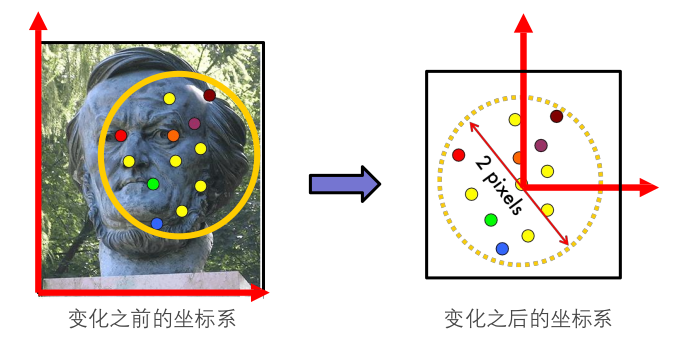
归一化八点法: 解决八点法缺陷。**对每幅图施加变换 $T$ (平移和缩放),让其满足如下条件:
- 原点 = 图像上点的重心;
- 各个像点到坐标原点的均方根距离等于 $\sqrt{2}$ (或者均方距离等于2)。
- 分别计算左图和右图的 $T$ 和 $T’$ ;
- 坐标归一化 $q_i = Tp_i$ ,$q’_i = T’p’_i$ ;
- 通过八点法计算矩阵 $F_q$ ;
- 逆归一化 $F=T’_TF_qT$ 。