本文主要关于深蓝学院系列课程——基于图像的三维重建的笔记。
课程链接 基于图像的三维重建
1、相机几何
1.1、针孔模型 & 透镜
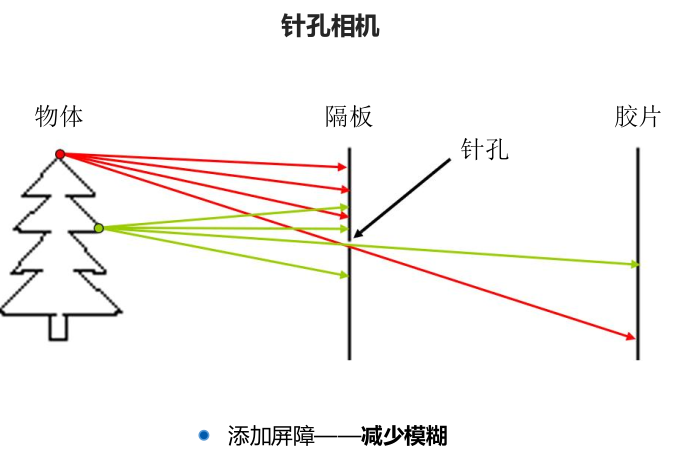
- 针孔模型:光线的传播导致 重叠,故需要遮挡过多的光线,使得 每一个点在胶片上只有一个成像点。
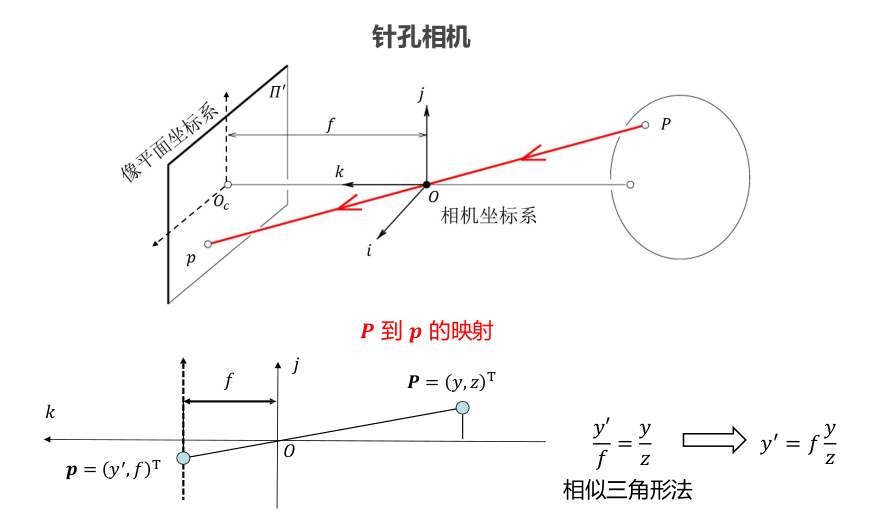
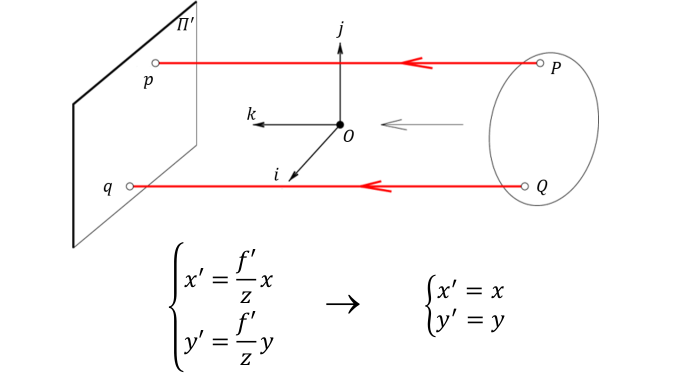
- 针孔相机的数学模型: 利用相似三角形的关系,可以得到真实空间中的一点与成像点的映射关系。
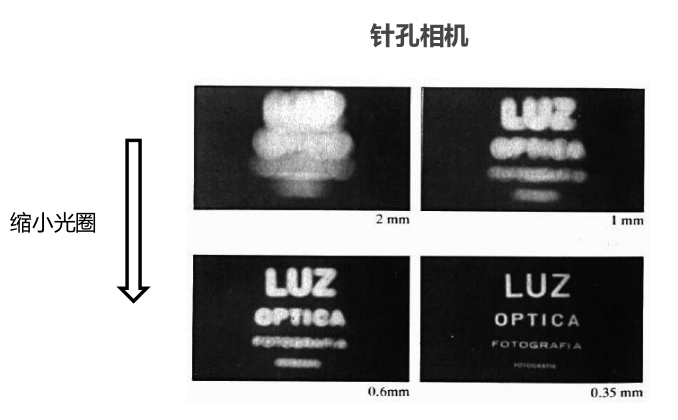
- 针孔大小对成像的影响: 光圈大,光线亮,成像模糊 (多条光线在同一成像点);光圈小,光线暗,成像清晰。
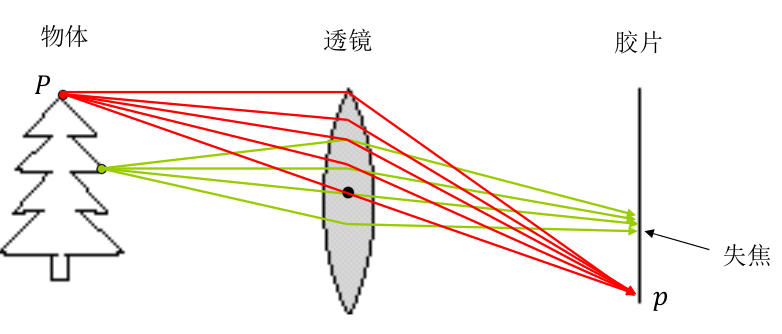
- 透镜: 使得同一个点的多条光线可以聚焦到胶片上,增加照片亮度。
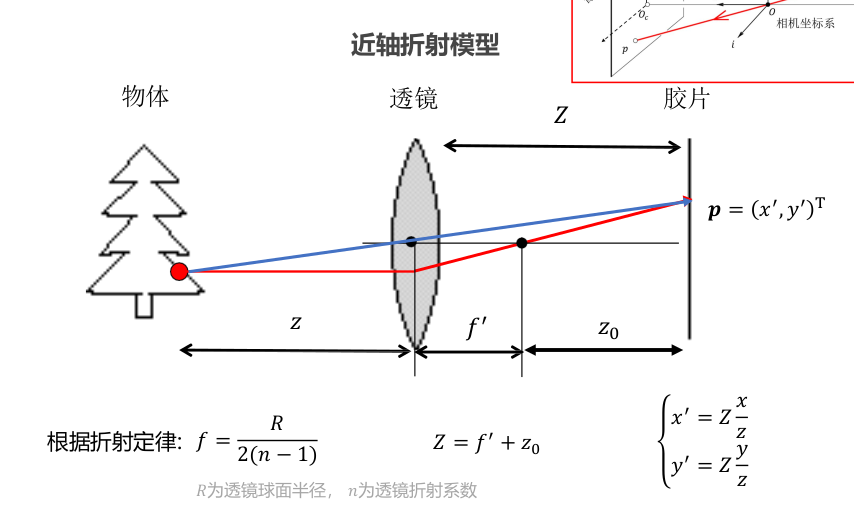
- 透镜问题:
- 失焦:透镜自身工艺原因不能将光线很好地汇集。可以清晰成像的部分称为景深。
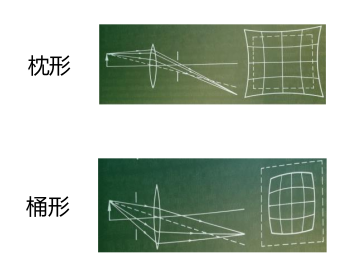
- 径向畸变:光线在远离透镜中心的地方比靠近中心的地方更加弯曲。主要分为 桶型和枕型 畸变。
1.2、相机几何
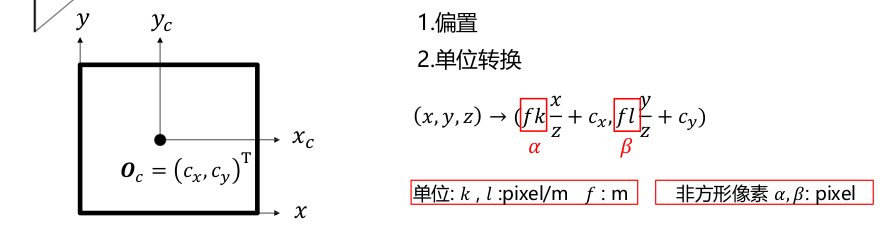
相机几何模型涉及到的坐标系: 相机坐标系、成像坐标系、像素坐标系。
成像坐标系与像素坐标系的转换关系: 统一单位系数 $k, l$ ,坐标系偏置 $c_x, c_y$.
- 齐次坐标系的引入和投影矩阵: 上述变换是 非线性的,在表达上十分不方便(非线性变换),为使其可以 线性表示,引入齐次坐标系表示。$M$ 称为相机的投影矩阵,表示三维点投影到 像素坐标系 的变换关系。
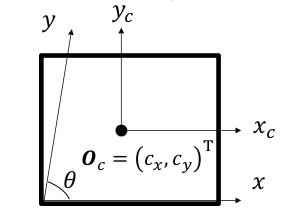
- 相机偏斜: 像素坐标系不满足严格的正交关系。
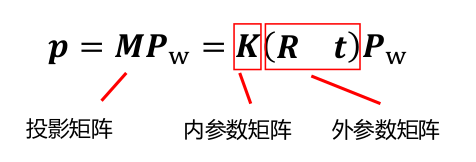
- 相机坐标系下的相机模型:
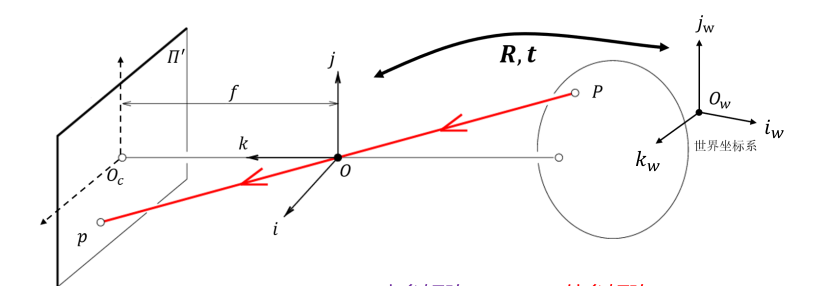
其中 $M$ 为投影矩阵; $K$ 为 相机内参,决定了相机坐标系下的空间点到图像点的映射; $({R}\quad t)$ 为 相机外参,表示相机坐标系相对世界坐标系的旋转和平移。
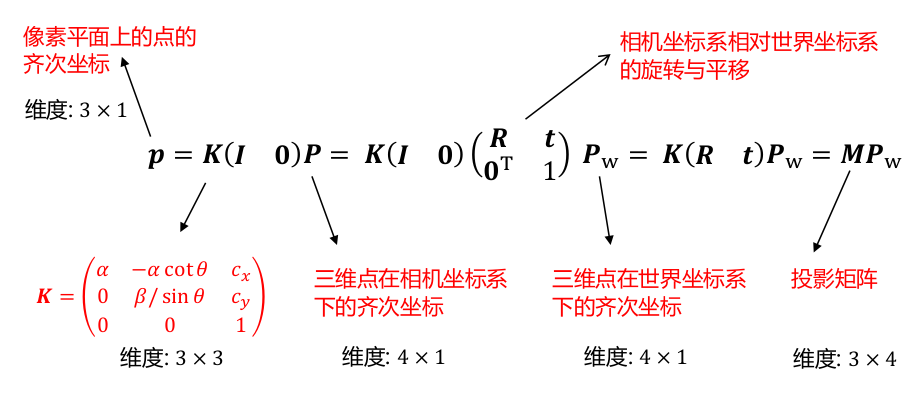
相机模型内外参的自由度: 相机模型一共 11个自由度,其中内参 5个自由度 ,外参 6个自由度(三维旋转+平移)。
$p$ 转换为欧式坐标:
- 相关定理:
- $M$ 是透视投影矩阵的一个充分必要条件是 $Det(A)\ne 0$.
- $M$ 是零倾斜透视投影矩阵的一个充分必要条件是 $Det(A)\ne 0$ 且 $(a_1\times a_3)\cdot(a_2\times a_3)=0$.
- $M$ 是零倾斜且宽高比为 1 的 透视投影矩阵的一个充分必要条件是 $Det(A)\ne 0$ 且 $\left\{\begin{matrix}(a_1\times a_3)\cdot(a_2\times a_3)=0\(a_1\times a_3)\cdot(a_1\times a_3)=(a_2\times a_3)\cdot(a_2\times a_3)\end{matrix}\right.$
- 投影变换的性质:
- 点投影为点;
- 线投影为线;
- 近大远小;
- 角度不再保持,平行线相交。
1.3、其他相机模型
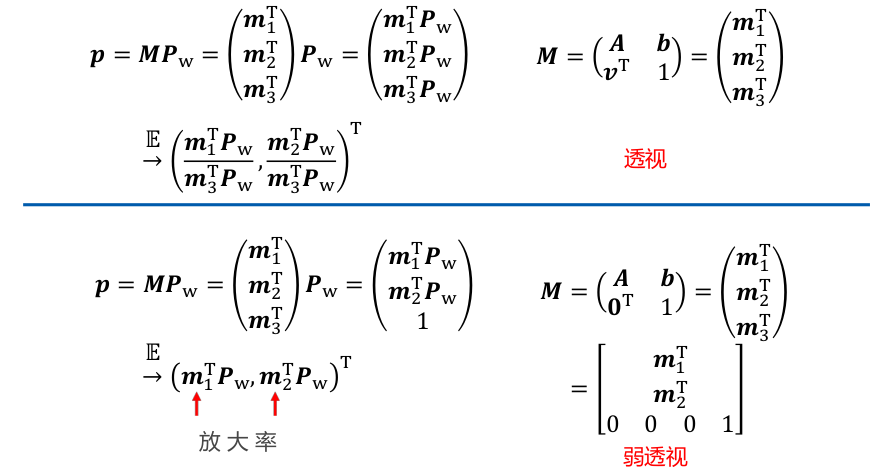
弱透视与透视投影相机: 弱透视是当物体离光心无限远,所有成像点 可以视为在同一平面。
思考: 缺少了哪三维的自由度?
- 答:关于 $X,Y$ 轴的旋转以及 $Z$ 轴的平移。
- 思考: 最后一行为何是 $(0,0,0,1)$?
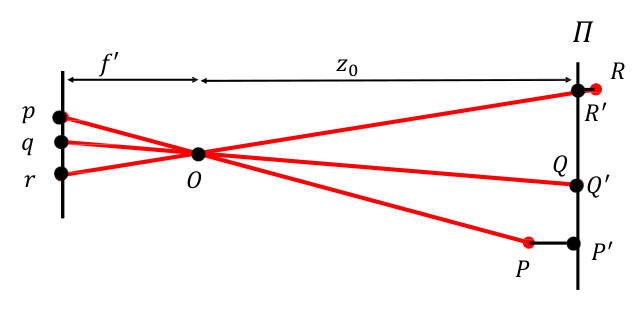
- 正交投影:光心距离成像平面以及物体均无限远。应用与工业设计,建筑设计。
2、相机标定
2.1、针孔模型 & 透镜相机标定问题
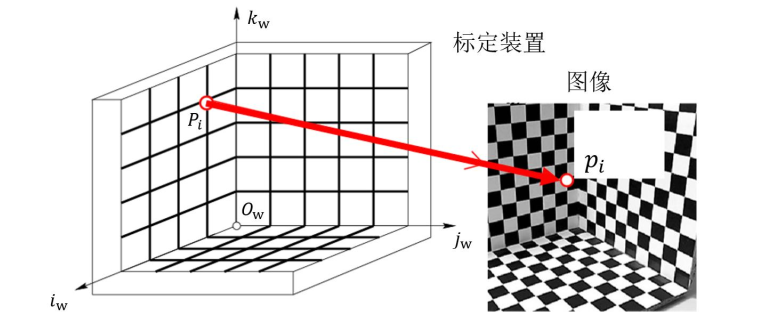
目标: 从1张或者多张图像中估算内、外参数矩阵。
方法: 通过标定装置,给定世界坐标系下的坐标点,同时从图像上得到坐标点在像素坐标系下的坐标,求解投影矩阵。
已知: 待求参数量(未知量)为 11个,一对对应点可以提供 2个方程。
求解: 至少需要 6对点对 进行求解。实际操作一般采用多于6对点对来获得更为鲁棒的结果。
标定问题: 方程数 $2n$ 个且 $n\ge 6$ ,未知参数 11个。为 超定齐次线性方程组 。
转换为最小二乘问题:
求解上式:
- 矩阵 $P$ 进行奇异值分解 $P=UDV^T$
- $x^*$ 为$V$ 矩阵的最后一列(最小特征值对应的右特征向量)
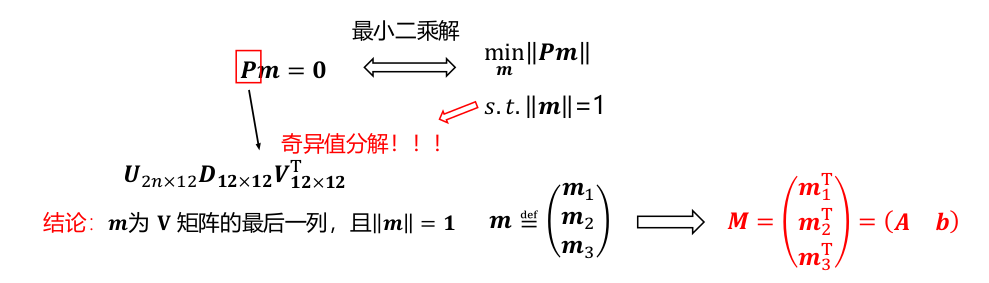
求解参数: 式中 $\rho$ 为 $\left | m \right | = 1$ 的约束带来的。正是由于这个约束,使得 $M$ 矩阵为11个自由度即可!
前置变换:
求得结果:
退化情况: 所选取点对不能位于同一平面。
2.2、径向畸变的相机标定
建模: 畸变示意图如下
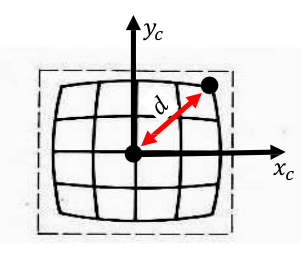
建模方程如下: 其中 $k_p$ 为畸变因子
设畸变参数矩阵与 $M$ 为 $Q$ :
构建方程组,该方程组为 非线性 方程组:
方法一: 采用 牛顿法或L-M法 进行非线性求解:
方法二: 先求解线性部分,再求解非线性部分:
非线性部分:
$m_3,k_1,k_2,k_3$ 关于 $m_1,m_2$ 的非线性函数,采用 牛顿法和L-M法 求解。