本文主要关于深蓝学院系列课程——基于图像的三维重建的笔记。
课程链接 基于图像的三维重建
1、纹理图像的自动创建
1.1、基础知识
纹理贴图: 同一三维模型采用不同纹理图案进行渲染。
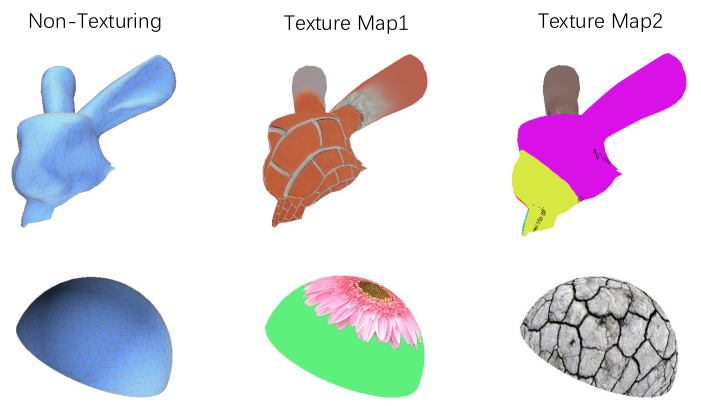
纹理坐标: 三维网格中的面片与纹理图像的映射关系。
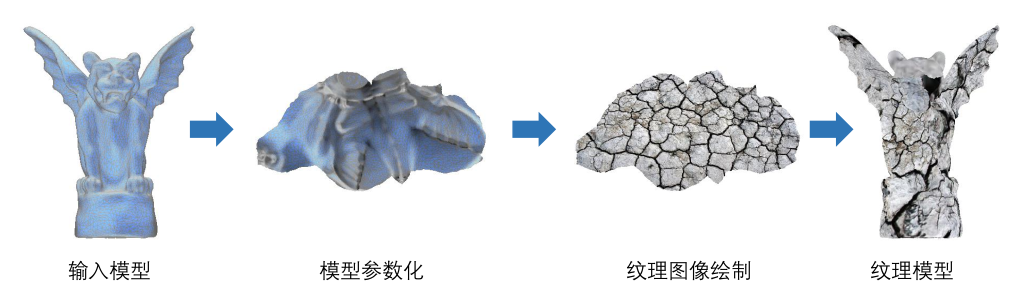
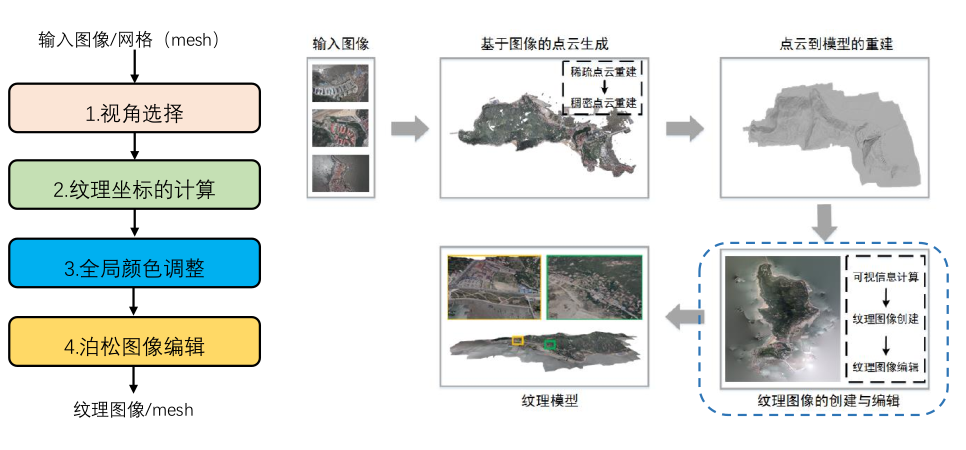
基本算法流程:
- 输入模型
- 模型参数化
- 纹理图像绘制
- 纹理模型
纹理图像的创建方式:
- 交互软件
- 自动计算
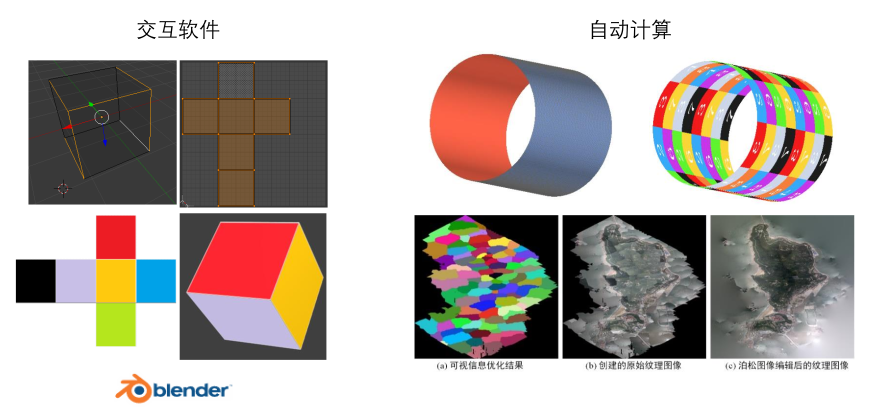
1.2、纹理图像的自动创建
算法流程:
- 视角选择
- 纹理坐标的计算
- 全局颜色调整
- 柏松图像编辑
视角选择:
选择标准:
- 图像的尺寸
- 图像的细节丰富程度
- 图像的可视化
- 邻域平滑性
数学模型:
- 将视角选择建模成多标签的分配问题:为每一个三角形分配一个标签(视角);
- 将网格上建立 MRF 随机场,每个面片代表随机场的一个顶点;
- 能量函数分为数据项 $E_{data}$ 和平滑项 $E_{smooth}$
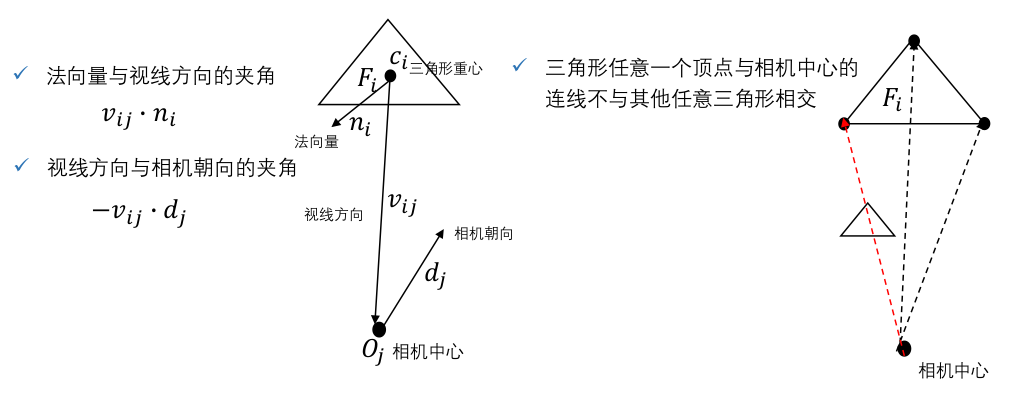
数据项:
- 图像质量:
- 纹理细节:投影三角形的平均梯度;
- 尺度:投影三角形的面积。
- 可视性:
平滑项:通过保持邻域的平滑性使得相邻三角形有相同的视角,从而可以减少缝隙为后续的处理提供便利。
MRF 视角选择常用优化方法:
- $\alpha - expansion$
- $\alpha-\beta \quad swap$
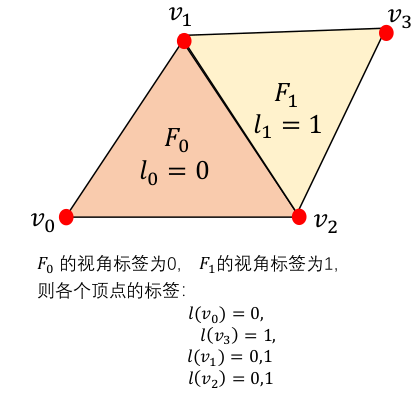
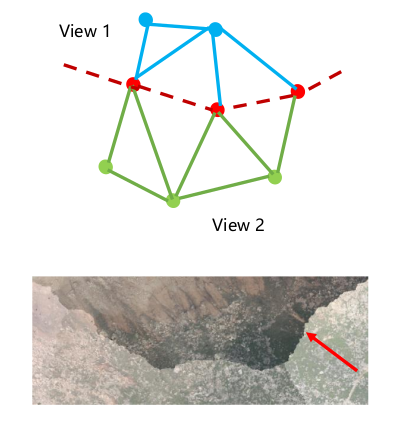
顶点处的视角标签:
视角选择是以 facet 为优化对象,边界上的 Vertex 会具有所有相邻 facet 的标签,即具有多个纹理坐标。
纹理坐标的计算:
投影到对应的图像上,街区最小包围盒范围内的图像作为纹理图像;
投影的坐标归一化后作为纹理坐标;
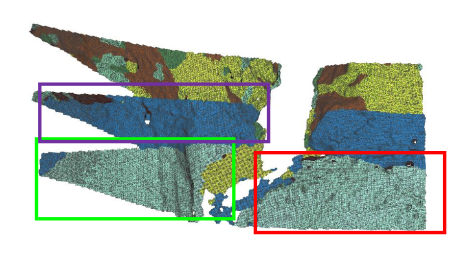
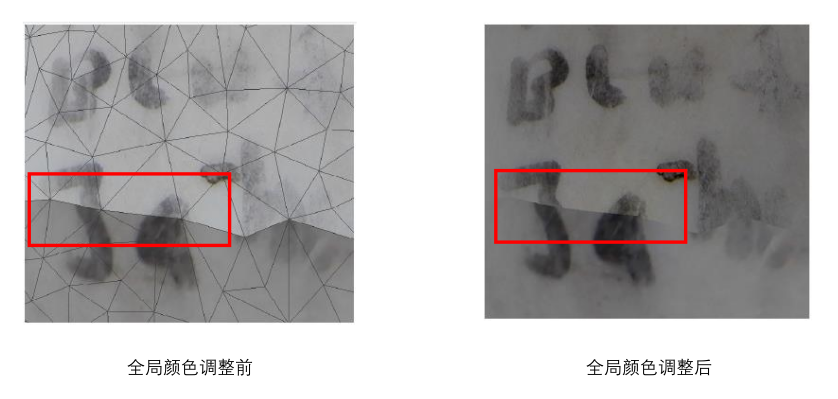
全局颜色调整:
问题引入:由于不同视角间存在相机曝光或者光照差异导致不同, Texture Patch 边界处存在明显缝隙。
解决思路:每个像素添加一个颜色调整量使得:
- 缝隙处的颜色差异尽量小;
- Patch 内部相邻像素的调整尽量近似。
参数量爆炸问题:
- 每个像素对应一个参数,使得整体参数量过大,计算量太大?
- 解决:仅考虑顶点处的色彩调整量
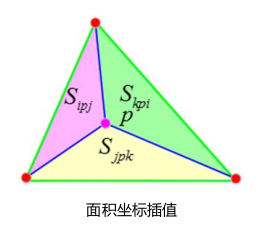
- 首先为每个顶点 $v_i$ ,添加一个调整量 $g_i$ ;
- 通过插值的方式得到每个像素的调整值
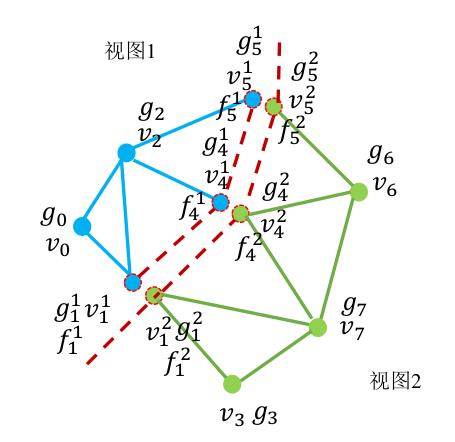
缝隙处顶点的调整量定义问题:
对缝隙处的顶点进行拆分,假设缝隙上的顶点 $v_i$ 的视角标签为 $\boldsymbol{l}_{i}=\{l_{i}^{0},l_{i}^{1},…l_{i}^{n_{v_{i}}-1}\},n_{v_{i}}$ 为标签个数,则顶点 $v_i$ 将被分为 $n_{v_i}$ 个顶点。
相应的颜色调整量 $g_i$ :
变量总个数:
函数能量定义为:$f_{i}^{l_{i}^{j}}$ 表示 $v_i$ 在视角 $l_{i}^j$ 中的颜色
建模后的能量函数一般为 稀疏线性方程 ,针对大规模的线性稀疏方程可以采用 **共轭梯度法(Conjugate Gradient)进行优化。
柏松图像编辑:
问题引入:对于缝隙比较严重的区域,全局颜色调整并不能保证完全去除缝隙,还需要进一步处理。
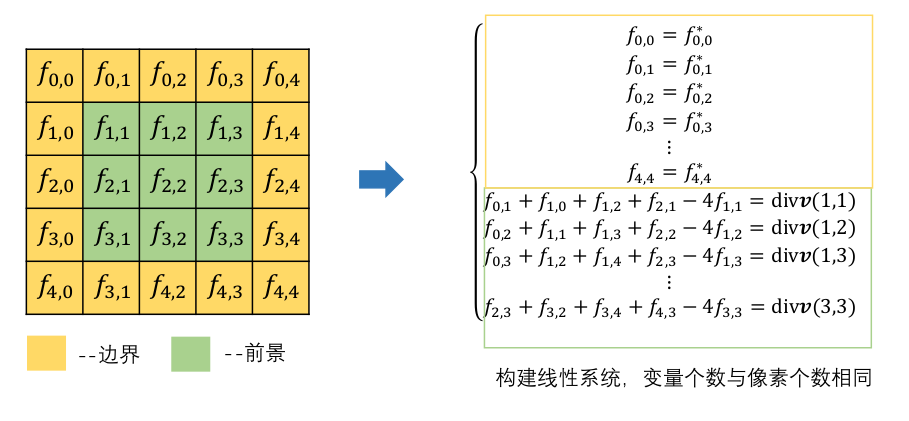
算法原理:
- 边界上的像素值与背景图像相同;
- 前景区域内的梯度与引导梯度场相同。
数学模型:
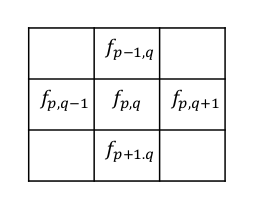
散度计算:
能量函数通过构建线性系统进行求解:
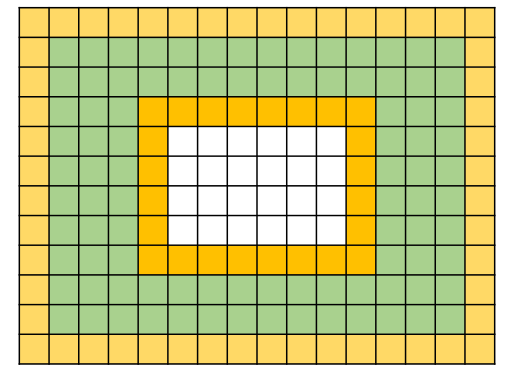
加速策略:
- 进行全局颜色调整之后,只需要在缝隙处进行泊松编辑即可;
- 可以通过控制内部区域的范围,(如由当前边界往前景区域扩充3个像素的作为前景进行计算),从而减少线性系统的规模。
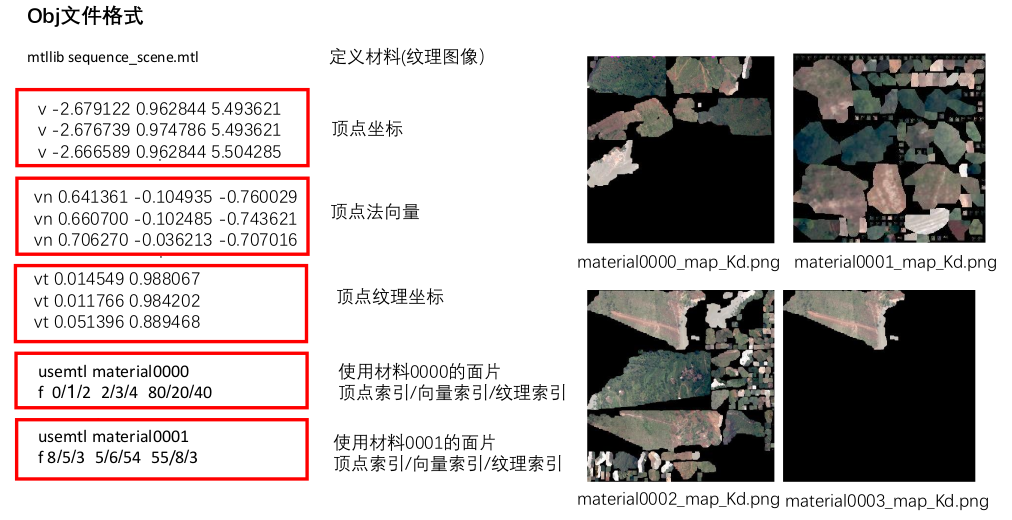
OBJ 文件:
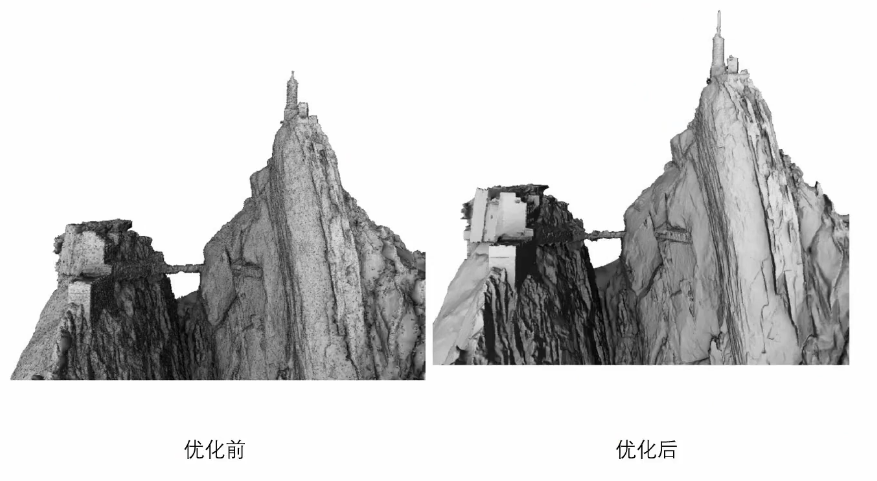
2、基于光度一致性的网格细节优化
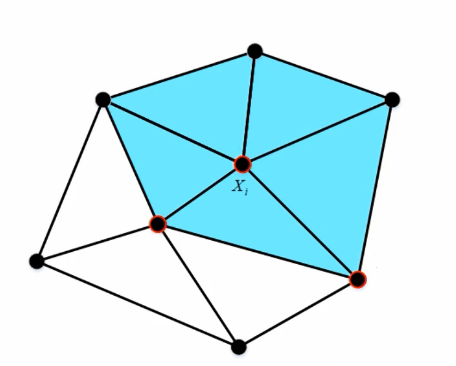
离散网格上定义能量函数:
每个顶点的梯度相当于 $1-ring$ 范围内所有点的梯度的加权和。
基于 surface 的光度一致性的度量:
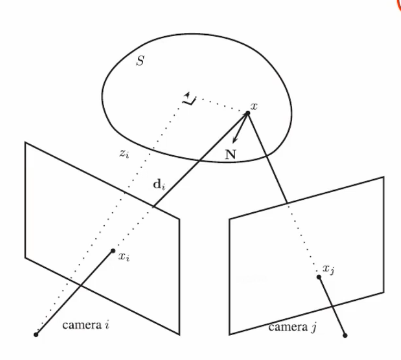
- $h(I,J)(x_{i})$ 表示在图像 $I$ 和 $J$ 之间在像素 $x_i$ 处的光度一致性;
- $I_{ij}^{S}=I_{j}\circ\prod_{j}\circ\prod_{i}^{-1}$ 表示将图像 $I_j$ 通过曲面 $S$ 重投影到图像 $I_i$ 上;
- $\Omega_{ij}^{\mathcal{S}}$ 表示重投影的有效区域;
- $\prod_i$ 和 $\prod_i^{-1}$ 分别表示第 $i$ 帧图像的投影和逆投影。
- 其中 $\mathrm{d}x_i=-\mathbf{N}^T\mathbf{d}_i\mathrm{d}x/z_i^3$
得到:
根据$\mathrm{d}x_i=-\mathbf{N}^T\mathbf{d}_i\mathrm{d}x/z_i^3$ :
保持 surface 本身的平滑性(对曲率进行约束):
得到最终梯度: