本文主要关于深蓝学院系列课程——基于图像的三维重建的笔记。
课程链接 基于图像的三维重建
1、稠密点云的获取方式
- 主动式:
- LiDAR扫描:精度高(毫米级别),效率高,有效范围几米到几百米,价格昂贵;受限于高反光、玻璃表面和吸收表面;
- Kinect:使用方便,价格适中,速度较快;精度较低,有效距离短;
- 结构光:高精度,高效率,近距离数据获取。
- 被动式:
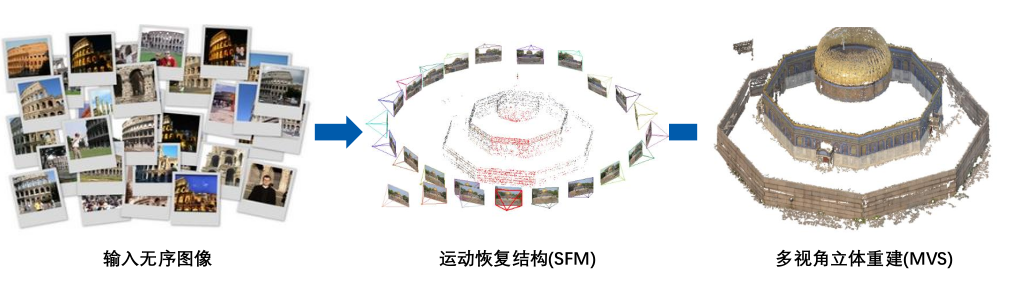
- Multi-view Stereo:无源被动式,成本低,图像来源广,计算速度慢,精度较高。
2、基于深度图的多视图立体几何
2.1、基础知识
像素点以及其对应的三维点之间的坐标关系:
- 像素点与相机坐标系下的三维点坐标关系:
- 像素点与世界坐标系下的三维点的坐标关系:
相机坐标原点与世界坐标系的关系:
最终得到:
面片模型:
概念:面片是三维物体表面的局部切平面,可以近似地表示某一局部范围内的物体表面。
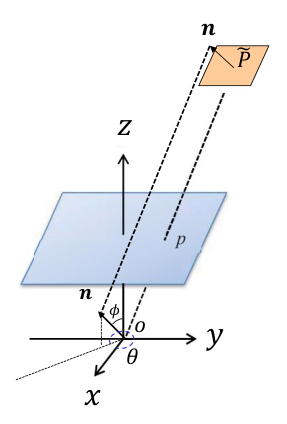
表示:面片 $p$ 是三维和空间中的一个矩形,由中心点 $\widetilde{P}$ 、单位法向量 $\boldsymbol{n}$ 表示,记作 $\boldsymbol{f_p=\{\widetilde{P} ,n\}}$
确定:面片由 $\lambda、\theta、\phi$ 决定,且一般限定范围为:
光度一致性:
归一化相关系数:
其中 $H_{ij}$ 为相机 $i,j$ 的单应矩阵。
光度一致性函数:
2.2、基于深度图的重建流程
核心重建步骤:
- 立体对选择
- 深度图计算
- 深度图细化
- 深度图融合
立体对选择:
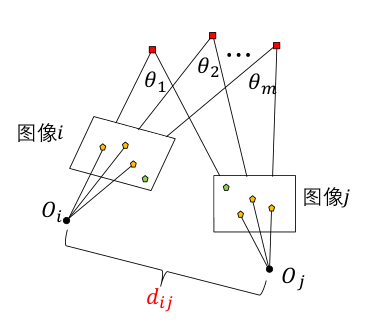
- 计算平均角度值: $m$ 为图像 $i,j$ 在 SfM系统中建立的对应点个数:
- 计算基线距离: $\hat{d}$ 为所有 $d_{ij}, j=1,…,n$ 的中位数:
- 按照 ${\theta_{ij}\cdot d_{ij}}$ 值的升序排列,选前 $k_1$ 个构建图像 $i$ 的邻域几何 $N(i)$ ;(升序是为了防止视距缩短以及遮挡问题)
- 参考帧为 $N(i)$ 中 ${\theta_{ij}\cdot d_{ij}}$ 最小的图像。
深度图计算:
如果迭代次数小于等于 $k_2(\text{如:}k_2=3)$ ,则对于图像 $i$ 的每个像素进行如下操作:
- 空间传播:判断邻域像素的面片参数是否更优(即光度一致性的值是否更低)。如果更优,利用邻域像素的面片参数设置当前像素的面片参数;
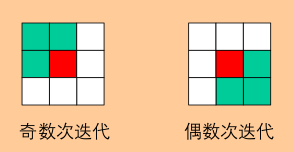
- 随机分配:通过随机采样,寻找光度一致性的值更低的面片参数。
- 若给定三个值 $\{\Delta\lambda,\Delta\theta,\Delta\phi\}$ ,在范围 $\lambda^{\prime}\in(\lambda-\Delta\lambda,\lambda+ \Delta\lambda),\theta^{‘}\in(\theta-\Delta\theta,\theta+\Delta\theta),\phi^{‘}\in(\phi-\Delta\phi,\phi+\Delta\phi)$ 中随机选择一组平面参数 $\{\lambda^{\prime},\theta^{\prime},\phi^{\prime}\}$ ;
- 使用公式 $\boldsymbol{X}_{i}=\lambda\boldsymbol{K}_{i}^{-1}\boldsymbol{p}、\boldsymbol{n}_{i}=\begin{bmatrix}cos\theta sin\phi\\sin\theta sin\phi\\cos\phi\end{bmatrix}$ ,重新计算新的平面 $f_{p}^{\prime}$ ;
- 如果 $m(p,f_{p}^{\prime})<m(p,f_{p}),\text{则令:}f_{p}=f_{p}^{\prime},\lambda=\lambda^{\prime},\theta=\theta^{\prime},\phi=\phi^{\prime}$ ;
- 将范围 $\{\Delta\lambda,\Delta\theta,\Delta\phi\}$ 减半;
- 如果迭代次数小于等于制定次数 $k_3$ ,则回到第一步;否则,退出。
深度图细化:
剔除光度一致性所有光度一致性高于 $\tau_1$ 的重建点;
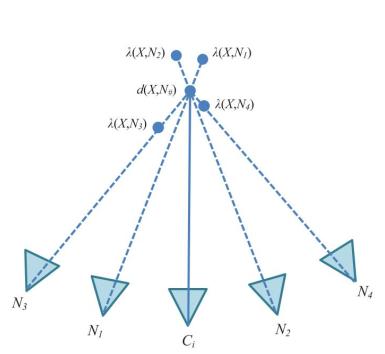
假设 $N_k$ 是 $N(i)$ 中的第 $k$ 个相邻图像,使用 $d(X,N_k)$ 表示 $X$ 相对相机 $N_k$ 的深度,$\lambda(X,N_k)$ 表示将 $X$ 投影到 $N_k$ 的深度图上得到的投影处的深度值:
- 如果 $\lambda(X,N_k)$ 与 $d(X,N_k)$ 足够接近,则认为两者具有深度一致性, $\tau_2$ 为阈值:
- 如果 $X$ 与 $N(i)$ 中至少 $k_4$ 张图像是一致的,则认为该点是可靠的,否则从 $I_i$ 的深度图中删除像素 $p$ 。
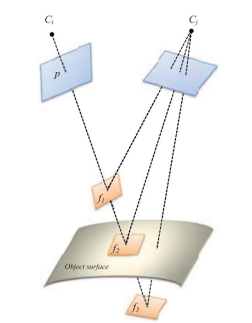
深度图融合:
- 剔除:在邻域视图中,剔除被遮挡的像素,如 $N_1,N_2$ 图像中的像素点;
- 去冗余:在邻域视图中,融合深度值相近的像素,如 $N4$ 图像中的像素点;
- 深度图融合: $\widetilde{X}=\lambda R_{i}^{T}K_{i}^{-1}\boldsymbol{p}+\boldsymbol{C}_{i}$ 。
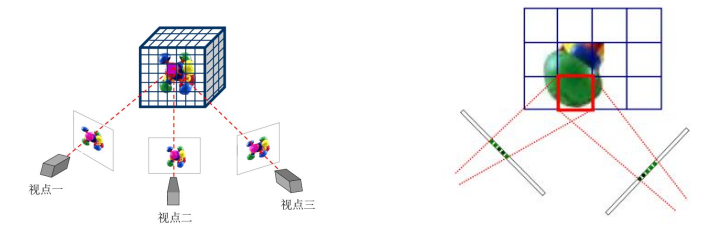
3、基于体素的多视图立体几何
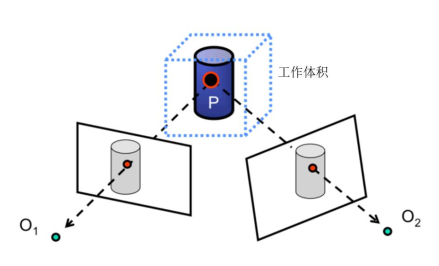
体素重建: 基于体素的方法需要已知相机的内、外参数矩阵!!!
- 假设给定的工作体积包含待重建物体;
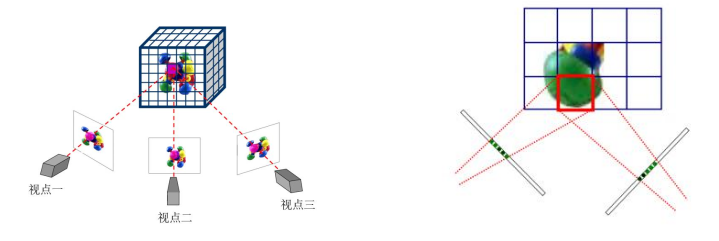
- 将工作体积内的三维点 $P$ 投影到多个视点的图像上;
- 验证 $P$ 点在各个视图上的投影点的“一致性”,以确定点 $P$ 是否属于待重建的物体。
3.1、空间雕刻法
基本概念:
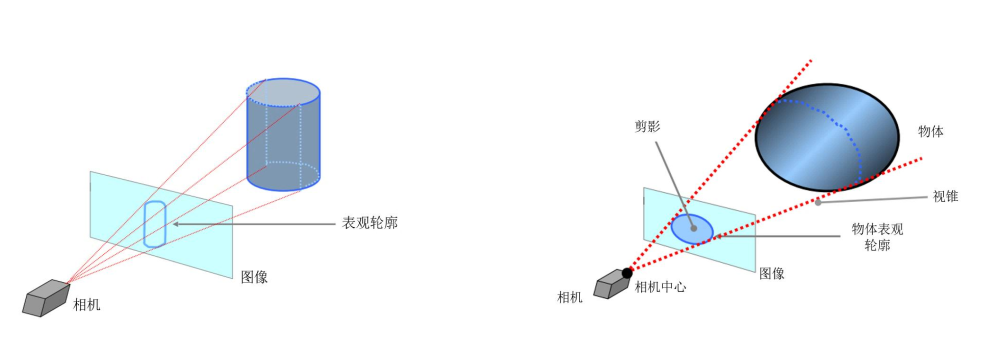
- 表观轮廓:物体表面可见部分和遮挡部分的分界线在图像平面上的投影。
- 剪影:图像平面中由表观轮廓包围的区域。
- 视锥:由相机中心和图像平面中对象的表观轮廓定义的包络面(待重建物体完全位于视锥内)。
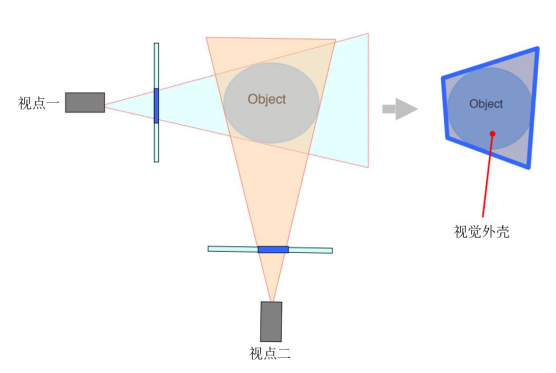
视觉外壳计算:
视觉外壳概念:艘有视锥的相交区域,它是待重建物体形状的逼近。
视觉外壳计算:对每个视锥建立参数方程,然后连理参数方程求解视锥交集,但过于复杂。
空间雕刻法的“一致性”定义: 给定工作体积中的一个点,将其投影到某个视图上时,如果投影点罗在该视图的剪影内,则称当前点满足该视图一致性要求。
空间雕刻法具体实现:
- 将工作体积(立方体)分解为子体积(子立方体),也称为体素;
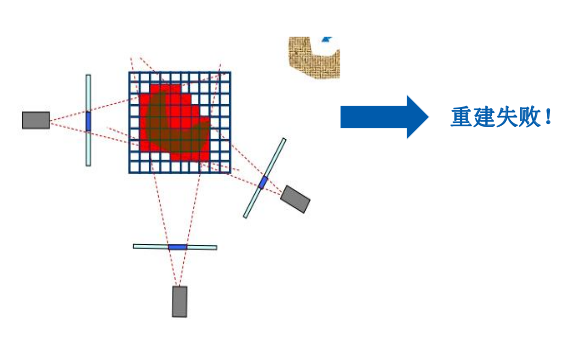
- 评估所有体素:将待判定的体素投影到所有视点的图像中,只要有一个视图不满足一致性要求,即投影点在视图的剪影外,则将该体素标记为空;否则标记为满(红色);
- 得到所有相机视锥交集的近似估计。
注意:剪影法获得的视觉外壳是待重建物体形状的一个上限估计,即重建物体的任何部分都在外壳内,但外壳内的某些部分可能不属于物体。

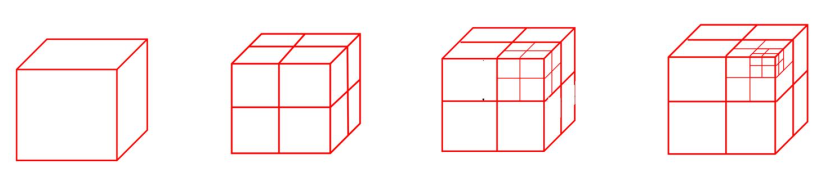
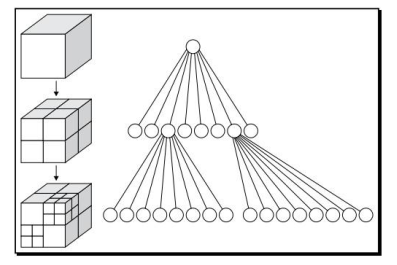
复杂度及解决: 采用上述方法对每个体素进行一致性估计,其计算复杂度太高,因此引入 八叉树 来解决。
八叉树: 基于八叉树的空间雕刻法,能在提高重建精度的同时,尽量减少计算复杂度。
空间雕刻法优缺点:
- 优点:
- 简单且具有鲁棒性;
- 不需要计算视图之间对应点的关系。
- 缺点:
- 对视图数量的依赖;
- 无法对物体的凹面进行建模。
3.2、体素着色法
体素着色法中的一致性: 使用投影点的色彩值来计算外观一致性。
计算步骤: 工作体积中的每个体素都被投影到图像中,因为体素具有一定的物理尺寸,所以它的投影很可能包含多个像素;计算这些像素的标准差,直接将其与某个阈值 $\lambda$ 比较来确认一致性。
色彩赋予: 对于那些通过外观一致性检测的体素,可以将其在图像上的投影点的色彩赋予它。
注意: 体素着色法仅适用于朗伯表面的重建任务,重建物体各个位置的感知亮度不随视点位姿变化而改变。
解决不唯一性问题的有效途径之一: 引入可见性约束,即遵循特定的顺序便利体素以消除歧义。
执行过程: 逐层探索体素一致性,从靠近相机的那些体素开始,然后逐渐到远离相机的那些体素。按照这个顺序,对每个体素执行一致性检查,并相应地将体素标记为满(占用)或者空(为占用)。