本文主要关于深蓝学院系列课程——基于图像的三维重建的笔记。
课程链接 基于图像的三维重建
1、运动恢复结构问题
运动恢复结构问题(Structure from Motion, SfM): 通过三维场景的多张图像,恢复出该场景的三维结构信息以及每张图片对应的摄像机参数。
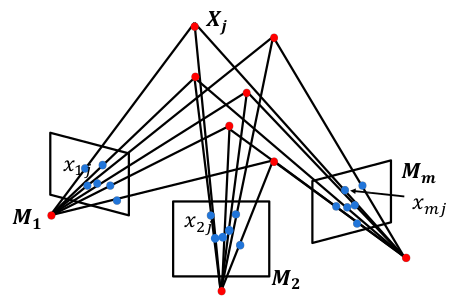
已知: $n$ 个 3D 点 $X_j$ 在 $m$ 张图像中的对应点的像素坐标 $x_{ij}(i=1,…,m;j=1,…,n)$ ,且 $x_{ij}=M_{i}X_{j}=K_{i}[R_{i}T_{i}]X_{j}\quad (i=1,…,m;j=1,…,n)$
求解:
- 运动: $m$ 个相机投影矩阵 $M_i(i=1,…,m)$ ;
- 结构: $n$ 个三维点 $X_j(j=1,…,n)$ 的坐标。
三类典型运动恢复结构任务:
- 欧式结构恢复(相机内参已知,外参未知);
- 仿射结构恢复(相机为放射相机,内、外参均未知);
- 透视结构恢复(相机为透视相机,内、外参数均未知)。
2、欧式结构恢复
2.1、双视图情况分析
已知:
- $n$ 个 3D 点 $X_j$ 在 $m$ 张图像中的对应点的像素坐标 $x_{ij}(i=1,…,m;j=1,…,n)$ ,且 $x_{ij}=M_{i}X_{j}=K_{i}[R_{i}T_{i}]X_{j}\quad (i=1,…,m;j=1,…,n)$
- $m$ 张图像对应的相机内参矩阵 $K_i(i=1,…n)$
求解:
- $n$ 个三维点 $X_j(j=1,…,n)$ 的坐标;
- $m$ 个相机外参数 $R_i,T_i(i=1,…,m)$。
三角化与欧式结构恢复: 两者仅相差相机外参数 $R_i,T_i$
- 线性法:
- 非线性法:
欧式结构恢复(2视图)求解步骤:
- 求解基础矩阵 $F$ (归一化八点法);
- 求解本质矩阵 $E=K_2^T F K_1$ ;
- 分解本质矩阵 $E \to R、T$ ;
- 三角化。
2.2、本质矩阵分解
目标:将本质矩阵 $E$ 分解为旋转和平移两个组成部分:
符号、尺度不确定说明: $x_{2}^{T}Fx_{1}=0$ 中无法确定 $F$ 的符号和尺度,故 $E=K_{2}^{T}FK_{1}$ 也无法确定其符号和尺度。
定义矩阵:
上述矩阵 在相差一个正负号的情况下 有如下性质:
$[T_x]$ 可以写成 $[T_\times]=kUZU^T$ ,其中 $U$ 是单位正交矩阵,在不考虑符号和尺寸的情况下 :
则:
对 $E$ 进行 SVD 分解:
结合式子(8)、(9):
注意: $E$ 的这个因式分解只保证了$UWV^{T}、UW^{T}V^{T}$ 是正交的。其为旋转矩阵还需要保证行列式的值为正:
对于 $T$ :
则一共有 4组 解:
选择正确解:
- 选择一个点三角化,正确的一组解能保证该点在两个相机的 $z$ 坐标均为正;
- 对多个点进行三角化,选择在两个相机系下 $z$ 坐标均为正的个数最多的那组 $R、T$ 。(更鲁棒)
本质矩阵分解小结:
- SVD分解:$E=U\mathrm{diag}(1,1,0)V^{T}$ ;
- $R=(\det\boldsymbol{U}WV^{T})\boldsymbol{U}WV^{T}\quad\text{或}\quad(\det\boldsymbol{U}W^{T}V^{T})\boldsymbol{U}W^{T}V^{T}$ ;$T=\pm u_{3}\left(U\text{的第三列}\right)$ ;
- 得到四组解:式子(13);
- 通过重建单个或者多个点找出正确解。
欧式结构恢复歧义:
- 歧义:恢复的结构与真实场景之间相差一个相似变换(旋转、平移、缩放);
- 度量重构:恢复的场景与真实场景之间仅存在相似变换的重构。
2.3、N视图情况
代数方法:
增量法:分别对每一个图像对计算运动和结构
局限性:容易出现误差累积
捆绑调整(Bundle Adjustment,BA):
最小化重投影误差:
方法:非线性最小化问题 ,牛顿法或L-M法
优势:
- 同时处理大量视图
- 处理丢失的数据
局限性:
- 大量参数的最小化问题
- 需要良好的初始条件
实际操作: 常用作 SfM 的最后一步,分解方法可作为优化问题的初始解。
3、PnP问题与P3P方法
PnP(Perspective-n-Point)问题: 指通过世界中 $N$ 个三维点坐标及其在图像中 $N$ 个像点坐标,计算出相机或者物体位姿的问题。
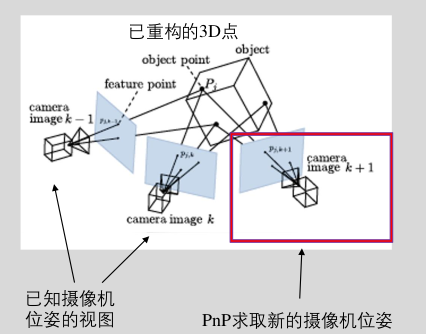
P3P方法: 通过世界中的3个三维点与图像中的3个像点,计算摄像机的位姿。
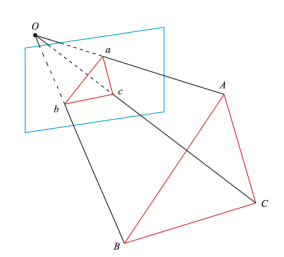
已知:相机内参 $K$ ,像素平面上 $a,b,c$ 点的像素坐标以及其对应的三维点 $A,B,C$ 在世界坐标系中的世界坐标;
求解:相机外参 $R、T$ 。
求解思路:
- 通过求解 $A,B,C$ 三点在当前相机坐标系下的坐标;
- 通过 $A,B,C$ 在当前相机下的坐标以及其在世界坐标系下的坐标,估计摄像机相对于世界坐标系的旋转和平移。
求解步骤:
- 通过相机内参数求得 $\overrightarrow{oa},\overrightarrow{ob},\overrightarrow{oc}$ 三条直线的方向,并计算 $cos<\overline{oa},\overrightarrow{ob}>,\cos<\overrightarrow{ob},\overrightarrow{oc}>,cos<\overrightarrow{oa},\overrightarrow{oc}>$
由已知信息可得:
则可得:
求得:
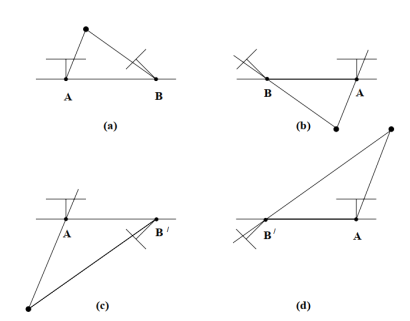
- 通过三角函数,求解线段 $OA,OB,OC$ 长度:
上述方程组存在四个可能解,需要另一对点对进行验证。
- 结合 $OA,OB,OC$ 线段安长度可以得到 $A,B,C$ 在相机坐标系下的坐标;
- 利用 $A,B,C$ 在相机坐标系及世界坐标系的坐标,计算相机的运动 $R,T$。
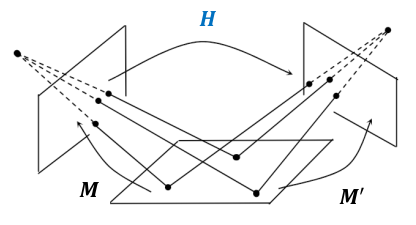
4、单应矩阵
单应矩阵: 空间平面在两个相机下的投影几何。
单应矩阵推导:
已知:两个相机内参矩阵分别为 $K,K’$ ,第二个相机相对于第一个相机的位姿为 $(R,T)$ ,$n$ 为平面 $\pi$ 在第一个相机坐标系下的单位法向量, $d$ 为坐标原点到平面 $\pi$ 的距离。
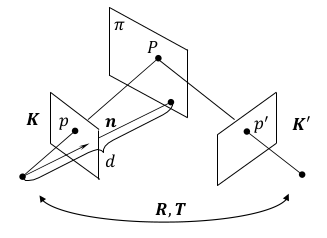
其中平面 $\pi$ 的方程为: $n^{T}\widetilde{\boldsymbol{P}}+d=0$
结论: 最终得到:
单应矩阵估计:
已知: $m$ 对点对应满足 $p’=Hp$ ;
求解:单应矩阵 $H$ 。
由已知可知:
即:
不失一般性,令 $w=1$ :
转化为矩阵形式:
即:
8自由度的 $H$ 至少需要4对点对应,实际远多于4对点对应
基础矩阵与单应矩阵:
由:
得到:
其中 $S=[t_{\times}]$ ,$t$ 是任意向量,具有三个自由度。
只要 $FH^{-1} =S$ 其中 $S$ 为 $3\times3$ 的反对称矩阵,则式(80)成立。
给定空间中同一平面上任意多个的三维点,我们仅能得到 $F=SH$ ,即无法得到确定的 $F$ ,也就无法得到 $E$ ,则无法分解 $R,T$ 。
- 解决上面问题,我们采用分解单应矩阵求解 $R,T$ 。$H=K^{\prime}(R-Tn_d^\mathrm{T})K^{-1}$
本质矩阵、基础矩阵与单应矩阵:
表达:
- 本质矩阵:$E=T\times R=[T_\times]R$ ;
- 基础矩阵:$\begin{array}{c}F={K^{\prime}}^{-\mathrm{T}}[T_{\times}]RK^{-1}\\={K^{\prime}}^{-\mathrm{T}}EK^{-1}\end{array}$ ;
- 单应矩阵:$H=K^{\prime}(R-Tn_d^\mathrm{T})K^{-1}$ ,$n^{\mathrm{T}}\widetilde{P}=d,n_{d}=\frac{n}{d}$
场景结构:
- 本质矩阵:描述规范化相机下两视图间的对极约束与场景结构无关,其仅依赖相机间的旋转和平移;
- 基础矩阵:描述两视图间的对极约束与场景结构无关,其仅依赖相机间的旋转和平移;
- 单应矩阵:要求场景中的点位于同一平面;或者两个相机之间只有旋转而无平移;
- 约束关系:
- 本质矩阵:建立规范化相机下点和极线的对应关系;
- 基础矩阵:建立点和极线的对应关系;
- 单应矩阵:建立点和点的对应关系。