本文主要关于深蓝学院系列课程——基于图像的三维重建的笔记。
课程链接 基于图像的三维重建
1、局部特征:角点
1.1、图像特征
特征提取动机: 全景拼接
全景拼接步骤:
- 特征提取
- 特征匹配
- 图像对齐
好特征的特性:
- 可重复性
- 显著性
- 紧致、高效
- 局部性
应用场景:
- 图像对齐
- 三维重建
- 运动跟踪
- 机器人导航
- 索引和数据库检索
- 物体识别
1.2、角点检测
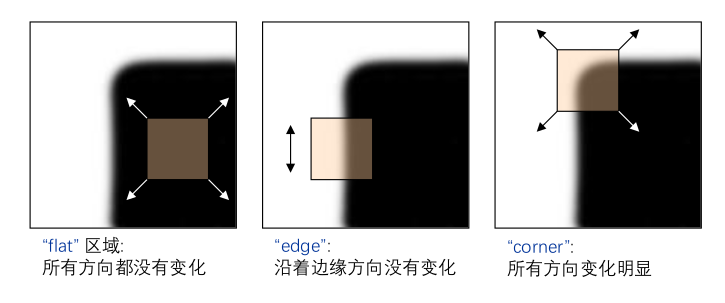
基本思想: 角点处,向任何方向移动窗口,灰度都会发生很大变化。
关键性质: 角点附近的区域,图像梯度有两个或多个主方向。
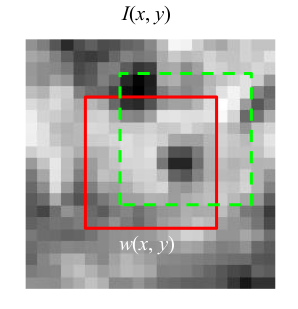
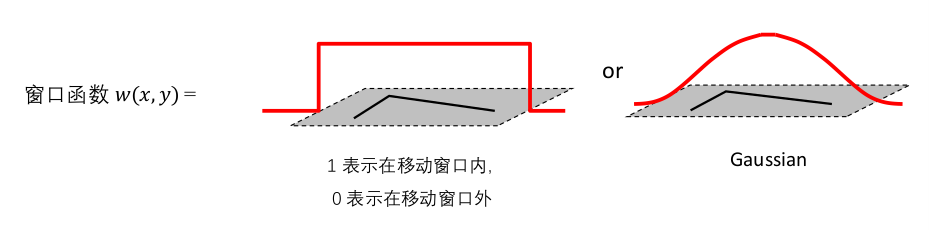
数学表达: 窗口 $w(x,y)$ 移动 $[u,v]$ 时的外观变化:
由于 $[u,v]$ 和 $E(u,v)$ 间存在 $I(x,y)$ 函数,无法反映两者之间关系,故对 $E(u,v)$ 在$(0,0)$ 处进行 二阶泰勒展开:
得到:
得到二阶近似表达:
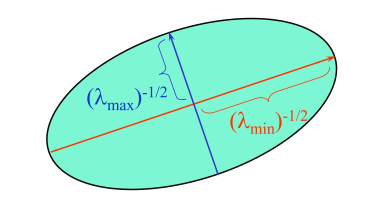
二阶矩矩阵: 考虑 $E(u,v)$ 的一个水平切片,其几何形状是一个椭圆。
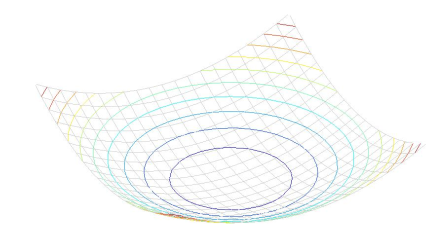
假设对角化矩阵 $M=R^{-1}\begin{pmatrix}\lambda_{1}&0\\0&\lambda_{2}\end{pmatrix}R$ ,其椭圆的轴长由特征值 $\lambda_{1},\lambda_{2}$ 决定,方向由矩阵 $R$ 决定。
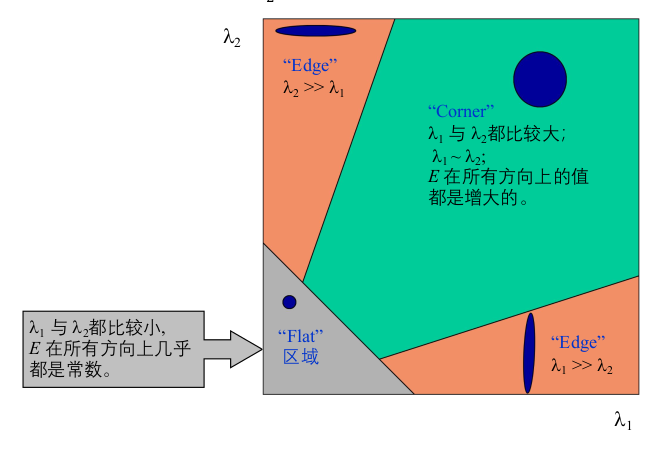
特征值: 利用二阶矩矩阵$M=R^{-1}\begin{pmatrix}\lambda_{1}&0\\0&\lambda_{2}\end{pmatrix}R$ 的特征值对图像中的点进行分类:
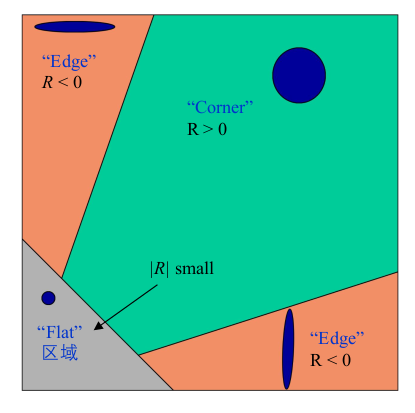
角点响应函数:
Harris角点检测步骤:
- 计算每个像素的局部梯度;
- 在每个像素周围的高斯窗口中计算二阶矩矩阵$M=\sum_{x,y}w(x,y)\begin{pmatrix}I_x^2&&I_xI_y\\I_xI_y&&I_y^2\end{pmatrix}$ ;
- 计算焦点响应函数$\mathcal{R}$ ;
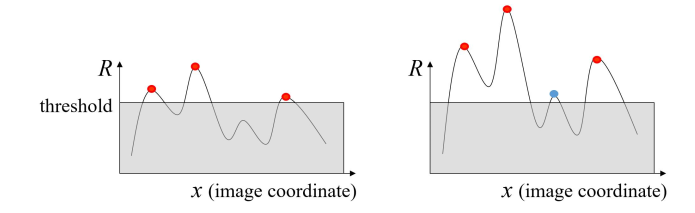
- 阈值过滤;
- 查找相应函数的局部最大值(非极大值抑制)。
角点性质:
- 对光照变化具有不变性;
- 对几何变化具有协不变性;
- 角点不具有尺度不变性;
- 对于亮度的仿射变化具有部分不变性:
- 计算过程中使用的是 导数 信息,因此,对于整体亮度变化具有不变性: $I\to I+b$ ;
- 对于亮度放缩,仅具有部分不变性: $I \to aI$。

2、局部特征:尺度不变区域检测
2.1、基础知识
尺度不变性:
- 目标:在不同尺度的图像中独立地检测出同一目标所占据的区域。
- 方法:需要设计尺度选择机制来寻找具有尺度不变性的特征区域。
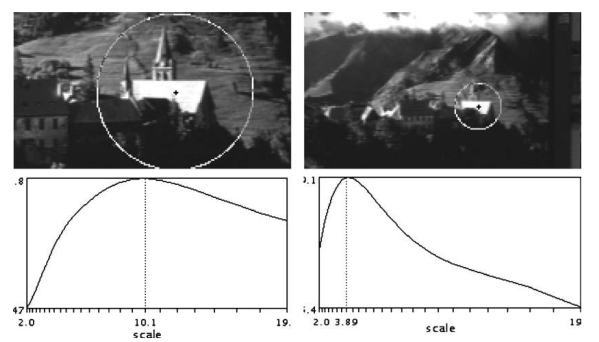
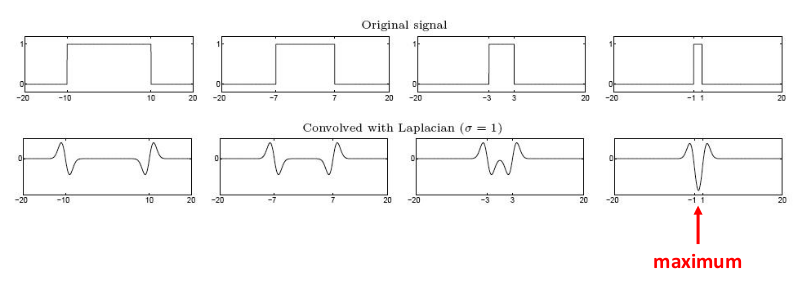
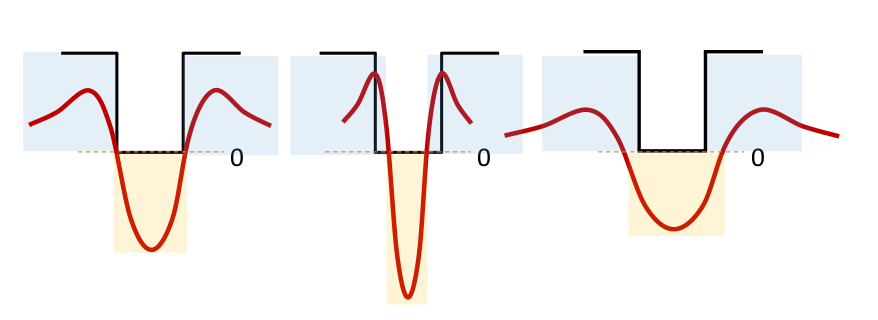
尺度匹配: 拉普拉斯算子尺度(标准差)与信号尺度“匹配”时,算子的响应幅值在尺度区域的中心达到最大。
尺度选择:
- 目标:将输入信号与多个不同尺度(标准差)拉普拉斯算子卷积,通过最大响应确定信号的尺度。
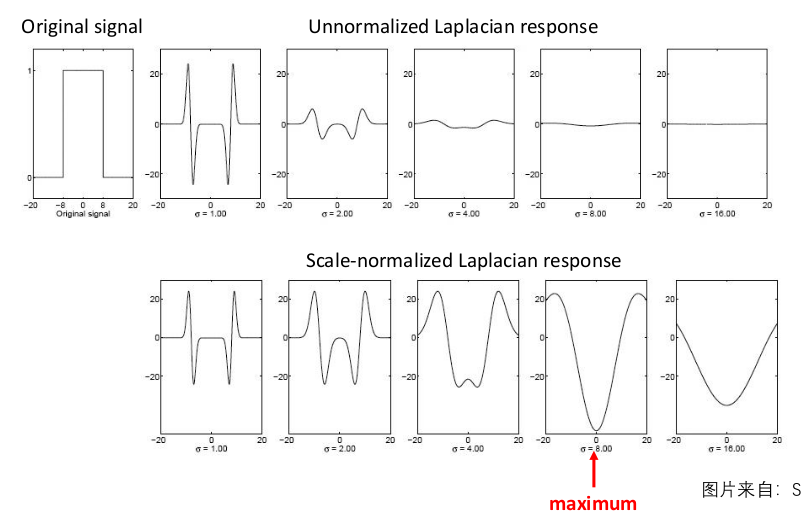
- 存在问题:拉普拉斯相应强度随着尺度的增加而衰减。
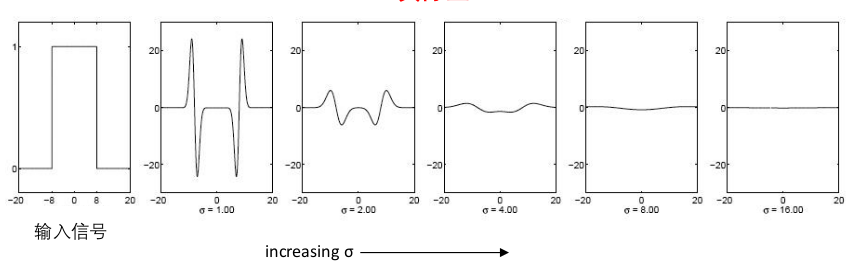
尺度归一化: 将卷积后的信号 乘以 $\sigma^2$ 来归一化响应强度。
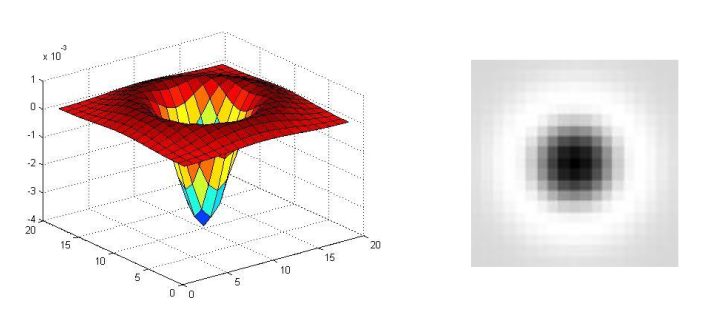
高斯拉普拉斯算子: 用于二维区域检测的圆形对称算子
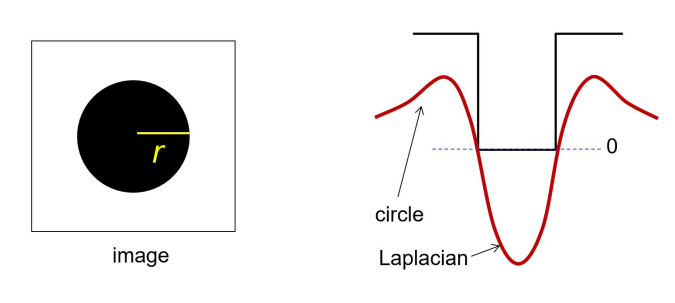
拉氏算子尺度(标准差)与信号半径 $r$ 之间的关系:
- 为获得最大响应,拉氏算子的零点必须与圆对齐。
- 拉是算子由$(x^{2}+y^{2}-2\sigma^{2})e^{-(x^{2}+y^{2})/2\sigma^{2}}$ 给出,最大响应发生在 $\sigma=r/\sqrt{2}$ 处。
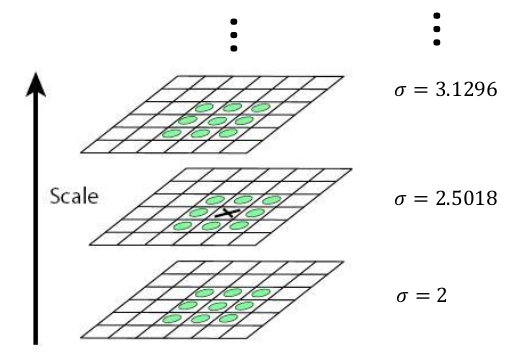
区域的尺度: 区域尺度定义为产生拉普拉斯响应峰值的尺度。
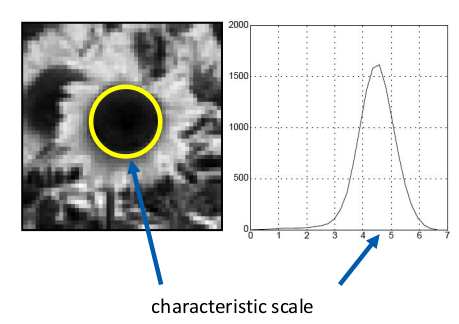
尺度不变区域检测检测器:
- 在多个尺度上使用归一化拉氏算子对图像进行卷积;
- 对于每个像素,在尺度空间中找到拉氏响应值的平方最大值。
高效实现方法:
- Harris-Laplacian:图像坐标空间中的 Harris 角点检测,尺度上采用拉氏算子。
- SIFT:在空间和尺度上的高斯差分。
2.2、SIFT特征
DOG算子: 采用 DOG(差分高斯)近似逼近拉氏算子。
SITF特性:
- 减少计算量:随着 $\sigma$ 增加,计算量成 $6\sigma+1$ 增加,且 $k>1$ ,导致计算量越来越大。DOG与原拉氏算子相差 $(k-1)$ ,能有效降低计算量。
- 提高效率: 提取特征过程中不是一味提高 $\sigma$ ,而是对图像进行缩小后采用同样的 $\sigma$ 进行提取,提取后的特征按照图像缩小比例进行放大,得到原图提取的特征。
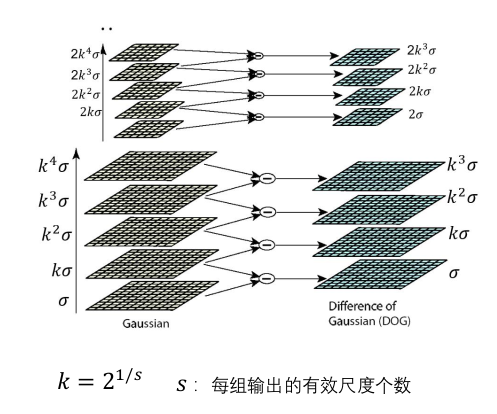
$s$ 取值: 一般取 $s=\sqrt{2}$ ,使得放缩成等比例的采样间隔。
SIFT特征文献: Distinctive Image Features from Scale-Invariant Keypoints
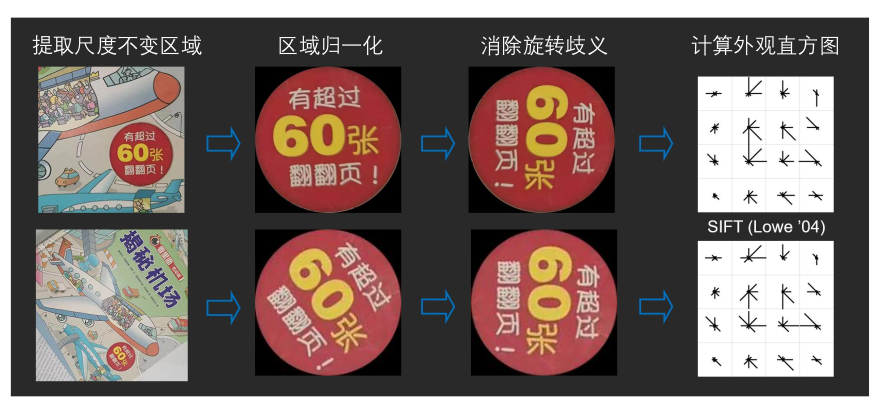
尺度归一化: 将对应的区域转换成相同大小的圆圈。
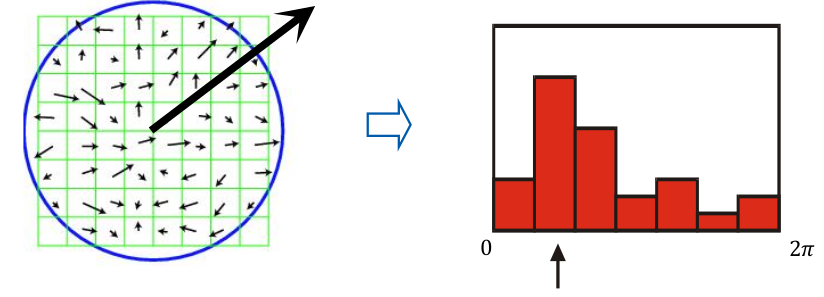
消除旋转歧义: 为图像窗口指定唯一方向:
- 创建局部区域的梯度方向直方图;
- 设置直方图峰值方向为主方向;
- 根据主方向对局部区域进行旋转。
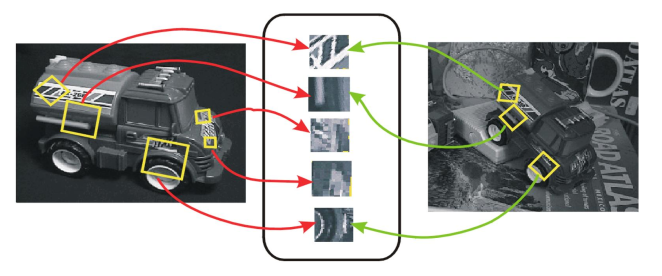
特征匹配: 对右图中的每个特征点 $i$ 在左图中:
- 找到距离其最近的特征点 $j_1$ 以及次近的特征点 $j_2$ ,并记录 $j_1,j_2$ 与特征点 $i$ 之间的距离为 $d_1,d_2$;
- 计算距离比 $d_1/d_2$ ,如果小于某个阈值,如0.6,则认为作图特征点 $i$ 与右图特征点 $j_1$ 是一对匹配点。
3、模型拟合之RANSAC
RANSAC: 随即采样一致性(Random sample consesus, RANSAC):一种适用于数据受到异常值污染的模型拟合方法。
基本步骤:
- 随机均匀采样获取模型求解所需的最小子集;
- 应用该子集估计模型参数;
- 计算剩余样本与当前模型一致性,统计满足当前模型点(内点)的个数,作为当前模型分数;
- 以设定的次数重复上述步骤,最终输出分数最高的模型。
参数设置:
- 初始点数量 $s$ :模型求解所需的最少的点的个数;
- 距离门线 $\tau$ ;
- 采样次数 $N$ :选择采样次数 $N$ 使得至少有一次采样为真实解的概率为 $p$ (如: $p=0.99$)
自适应迭代次数: 外点率通常是未知的,按最坏的情况估计,如 50%;然后,根据计算结果自适应调整外点比率,修正所需要的总采样次数。
- $N = \infty,\text{采样次数}=0,e=1$ ;
- While $N$ > 采样次数:
- 采样一组样本点,计算模型内点数;
- 设置 $e’=1-\text{内点数/总点数}$ ;
- if ($e’<e$) 令 $e=e’$ ,基于 $e$ 计算所需的迭代次数 $N$ ;
- 采样次数 + 1.
RANSAC 估计基础矩阵:
- 输入:左、右图像的所有匹配点对;
- 输出:两副图像间的基础矩阵 $F$ :
- 随机均匀采样八对匹配点对;
- 基于采样点对,使用归一化八点法估计基础矩阵 $\hat{F}$;
- 计算生于匹配点对是否满足当前 $\hat{F}$ ,统计满足当前 $\hat{F}$ 的匹配点对数量作为当前 $\hat{F}$ 分数;
- 以设定的次数重复1-3 ;
- 使用最高分数的 $\hat{F}$ 的所有匹配点对估计基础矩阵 $F$ ;
- 输出 $F$ 。