前言
2021年全国大学生工程训练综合能力竞赛——智能垃圾分类项目总结
本文主要分为如下四个部分:
- 赛题说明
- 识别算法
- 电控设计
- 总结说明
获奖情况:广东省一等奖(第三名,前两名可进入国赛)
赛题说明
竞赛命题
功能要求
生活垃圾智能分类装置对投入的垃圾具有自主判别、分类、投放到相应的垃圾桶、满载报警、播放垃圾分类宣传片等功能。
电控及驱动要求
生活垃圾智能分类装置所用传感器和电机的种类及数量不限,鼓励采用 AI技术。在该装置的上方需配有一块高亮显示屏,支持各种格式的视频和图片播放,并显示该装置内部的各种数据,如投放顺序、垃圾类别名称、数量、任务完成提示、满载情况等。该装置各机构只能使用电驱动,最高电压不大于 24 伏,电池供电(禁止使用蓄电池)。供电电压不符合要求,取消比赛资格。
机械结构要求
自主设计并制造生活垃圾智能分类装置的机械部分,除标准件外,非标零件应自主设计和制造,不允许使用购买的成品套件拼装而成。每个垃圾桶至少朝外的面要透明,能看清楚该桶内的垃圾,并在垃圾桶上注明垃圾的类别。该装置上设有一个垃圾投入口,投入口的尺寸为 200×200(mm),选手将垃圾投入在该区域,然后由垃圾智能分类装置自动分类和投入到相应的垃圾桶。
外形尺寸要求
- 生活垃圾智能分类装置外形尺寸(长×宽×高)限制在 500×500×850(mm)内方可参加比赛。
- 生活垃圾智能分类装置有四个单独的垃圾桶,垃圾桶为立方体或圆柱体,其中:
- 存放电池的垃圾桶尺寸如下:立方体垃圾桶(长×宽×高)不小于:100×100×200(mm),圆柱体垃圾桶(直径×高)不小于:Φ100×200(mm);
- 其余三个垃圾桶尺寸如下:立方体垃圾桶(长×宽×高)不小于:200×200×300(mm),圆柱体垃圾桶(直径×高)不小于:Φ200×300(mm)。
投放物料
- 有害垃圾:电池(1 号、2 号、5 号)等;
- 可回收垃圾:易拉罐、小号矿泉水瓶等;
- 厨余垃圾:小土豆、切成电池大小的萝卜、胡萝卜等;
- 其他垃圾:烟头、鹅卵石(小土豆大小)等。
现场竞赛流程
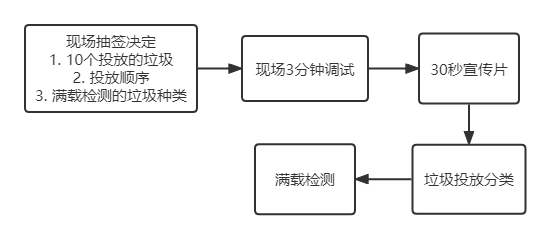
一共两次机会,取最好成绩
识别算法
图像处理

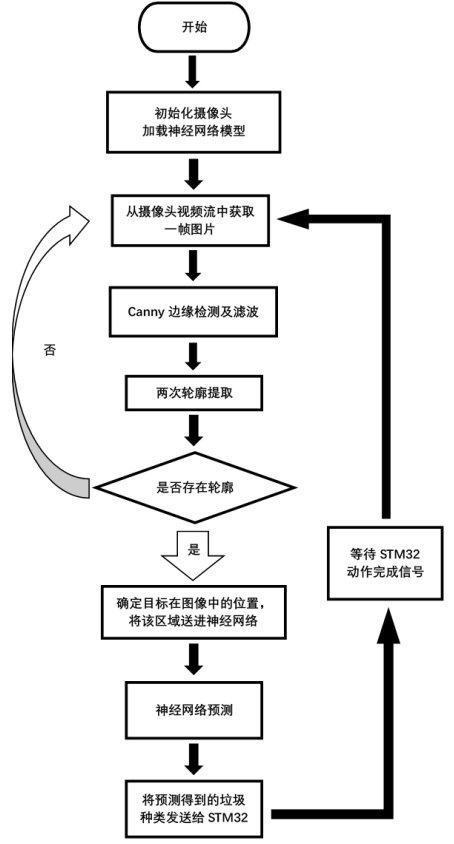
如上图所示是实际截取的画面信息。在将该图片送入神经网络训练前需要先对其做简单处理,以便减少网络训练的数据量。具体做法如下:
首先从摄像头视频流中读取一帧图像,对获取图像进行Canny边缘提取,进行第一次边缘轮廓提取,将边缘提取后的图像信息做通过距离变换分离粘连的轮廓,计算各个轮廓面积选取面积最大的有效轮廓,将该图像截取出来,送入神经网络进行训练。
神经网络搭建
神经网络主要采用了MobileNetV3的框架,作者设计初衷是应用于可移动设备的神经网络,其快速,简洁的特点是很适合算力有限的设备的。
我们本身没有采用pytorch框架进行计算识别,而是采用了OpenCV中DNN模块进行网络构建,这样我们只需要运行OpenCV单个线程就可以达到识别效果了,同时OpenCV中对框架的优化也大大提高了系统计算效率。
整体识别算法的流程框架如下:
电控设计
这部分由于涉及到专利申请部分,所以不放垃圾桶结构的设计图
垃圾分类
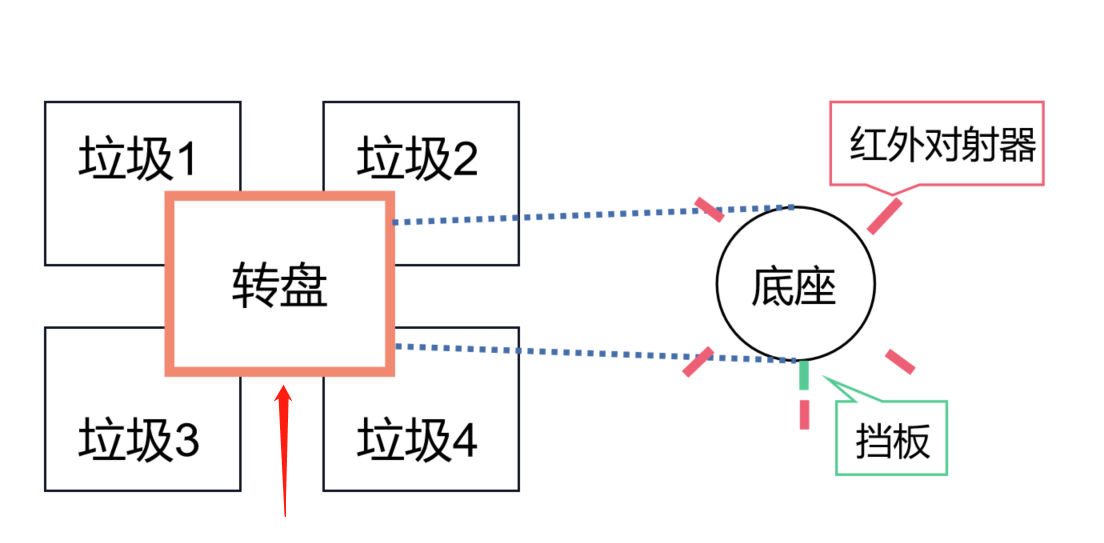
上图是垃圾桶工作原理的俯视图,红色箭头为垃圾投放的位置,也是垃圾倾倒到对应垃圾桶的出口。我们在四种垃圾对应的位置放置了红外对射器,当底座随着转盘旋转后,底座上的挡板也跟随移动,当对应垃圾的红外对射器检测到挡板后,转盘停止运动,随后执行倾倒垃圾的程序。倾倒完毕,转盘重新回到初始位置,即上图中所示位置,到达初始位置的原理同寻找各个垃圾桶相同,也是通过红外对射器检测。
具体例子:从红色箭头处投放垃圾,Nano识别垃圾,返回垃圾种类为“垃圾2”,则转盘逆时针旋转,当挡板打到垃圾二对应的红外对射器时,转盘停止运动,执行倾倒程序。倾倒完成后,转盘顺时针旋转,当挡板打到初始位置的红外对射器时,转盘停止运动。
满载检测
我们的方案十分简单,在对应的垃圾桶的斜对角线上装超声波模块,当垃圾满载后,超声波模块探测的距离会小于某一阈值时,即触发报警。
.png)
总结说明
首先是十分可惜地没能进入最终的国赛,有很多规则上的问题使得我们扣了不该扣的分。如:播放视频需要有音响播放声音;检测满载是动态地检测模式。这些细节上的分数使得我们最终屈居第三。
在比赛开始前更是差点直接不能参加比赛。在垃圾桶投放口的理解上,我们与组委会产生了分歧,在比赛检录时候认为我们不合规,好在我们对这个模糊的规则定义留了后路,在百米冲刺的来回拿工具修改的过程中,我们成功参加了后续的比赛,但因为修改了我们投放口装置(一个斜坡的板,放下时,连接转盘,收起时,遮挡投放口),斜坡板被迫拆除,同时由于操作人员的手不能伸到垃圾桶内部,导致垃圾投放要用“丢”的方式(可以看垃圾桶的俯视示意图,垃圾桶转盘位于垃圾桶中央),导致垃圾通过弹射直接掉到了错分的垃圾桶内。
工训算是给我个人心情起伏最大的比赛之一了,从差点无法比赛的惊慌,到比赛时困难升级的紧张,到没能拿到最好分数的失落于担心,心情一步一步跌入谷底。宣布成绩是从低奖项往高奖项宣布的,二等奖最后一个名字没有听到自己队伍的名字算是长舒了一口气,也很兴奋,但最后得知没能进入国赛的消息也确实让人感到惋惜。
最后还是例行的感谢hhh,感谢各位给力的队友,家人,老师们的支持与陪伴,让我拿下了本科生涯又一具有含金量的奖项。