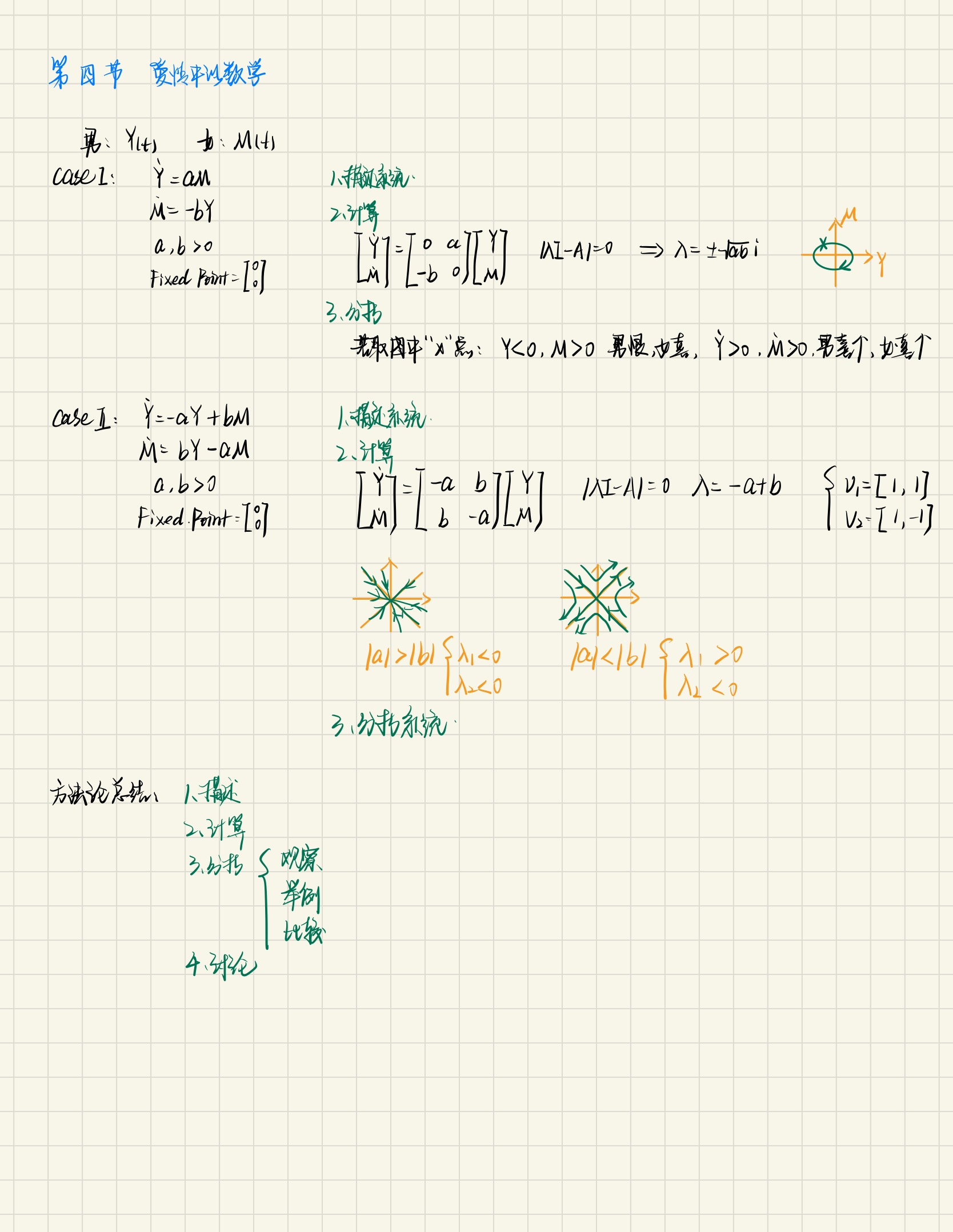
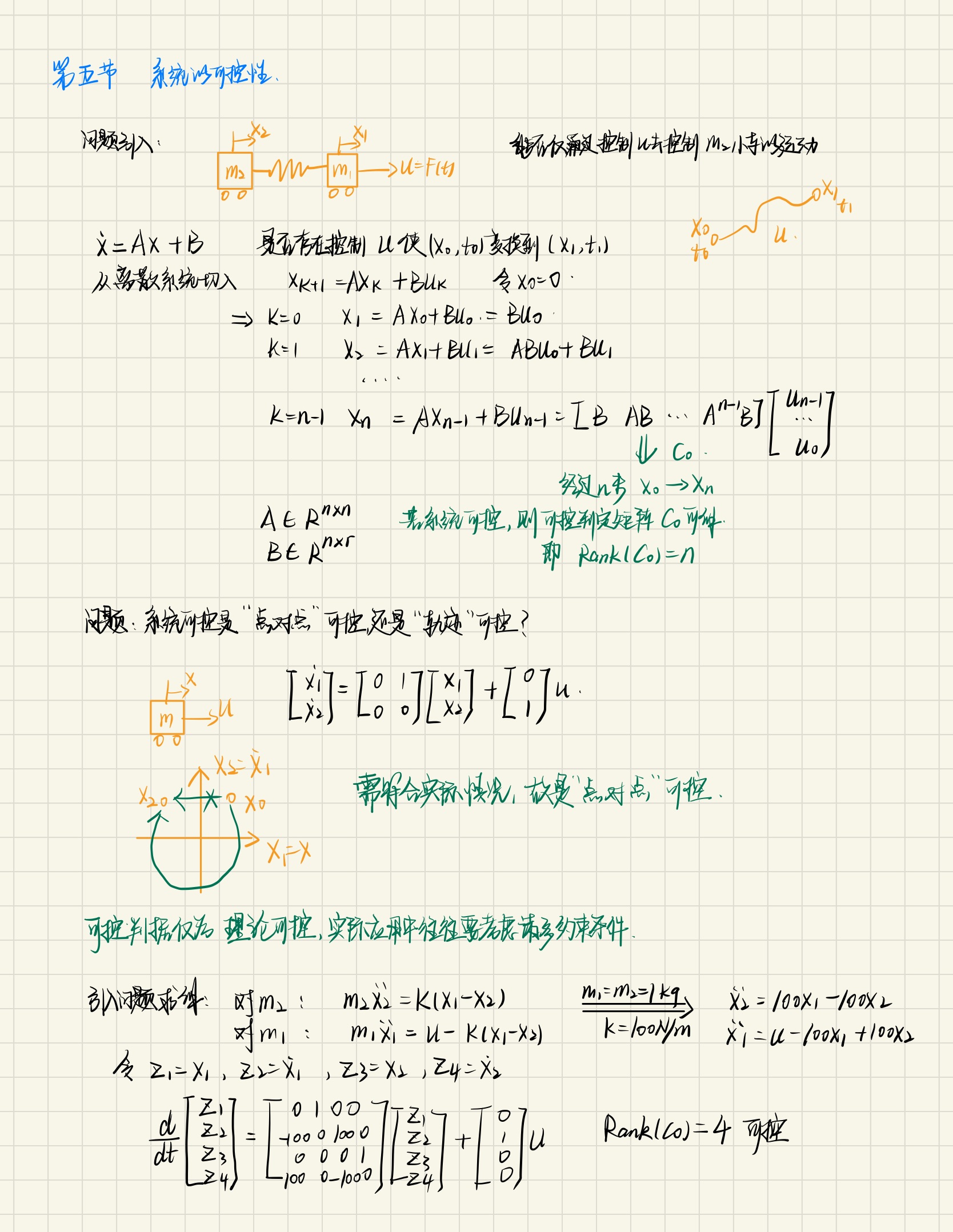
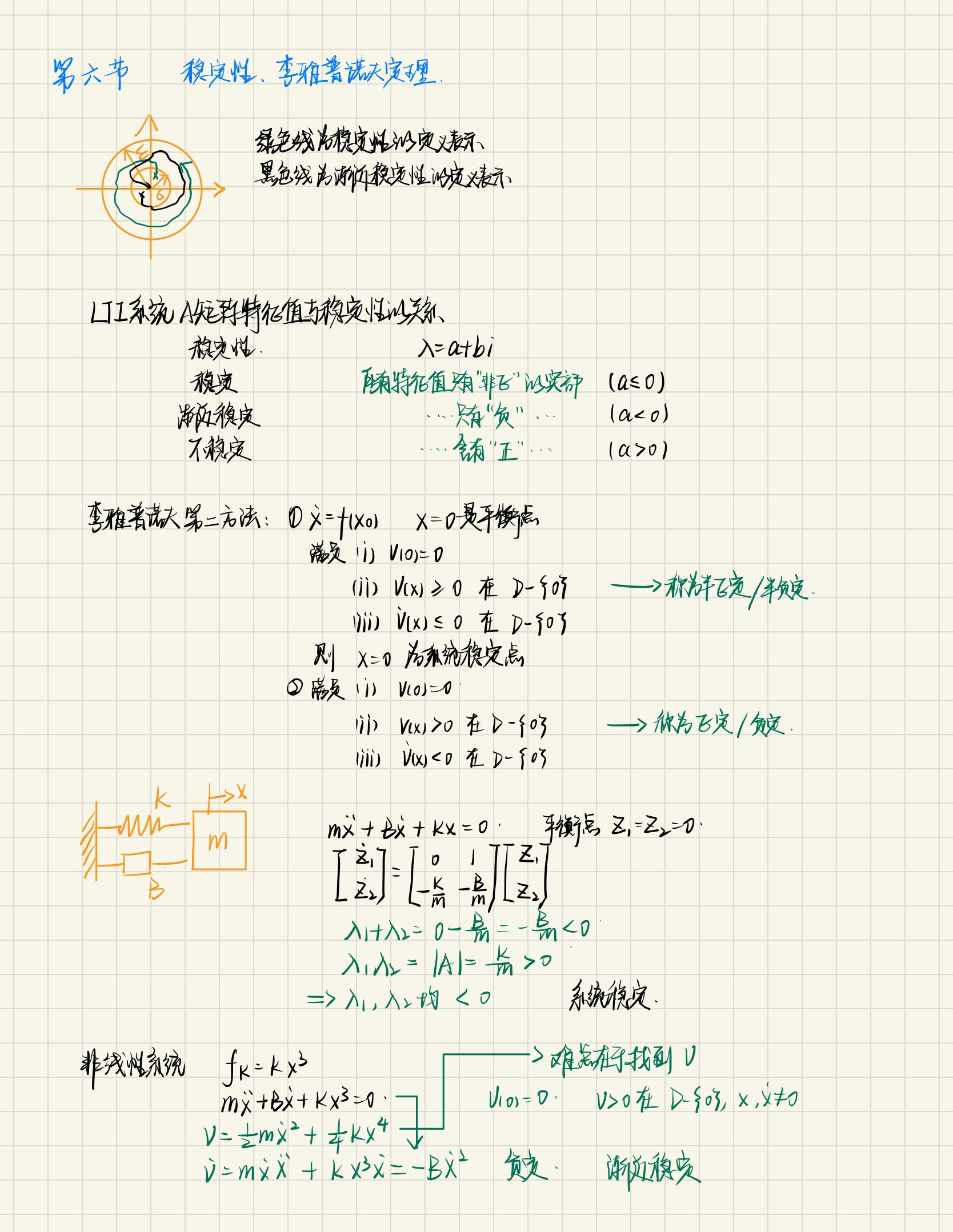
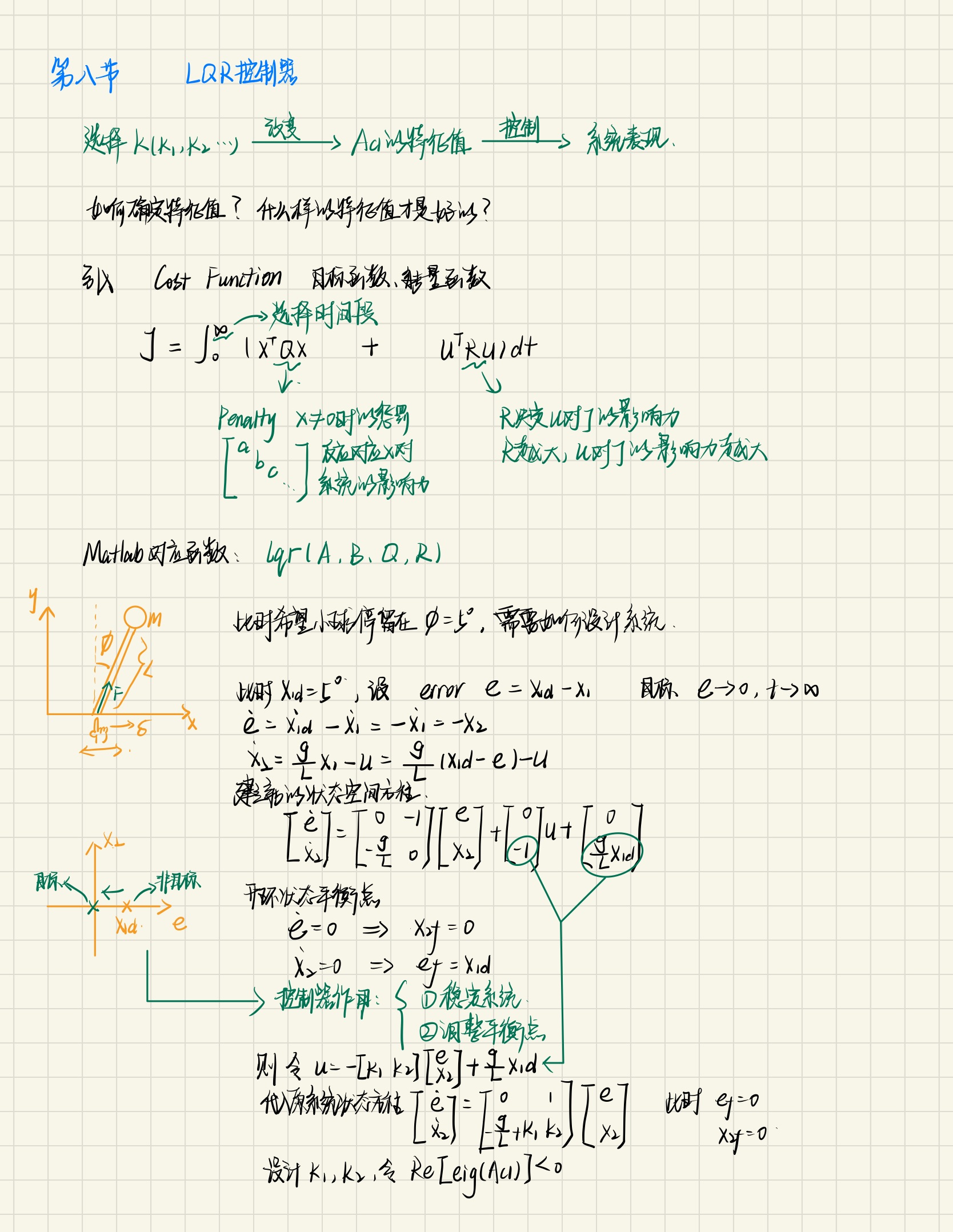
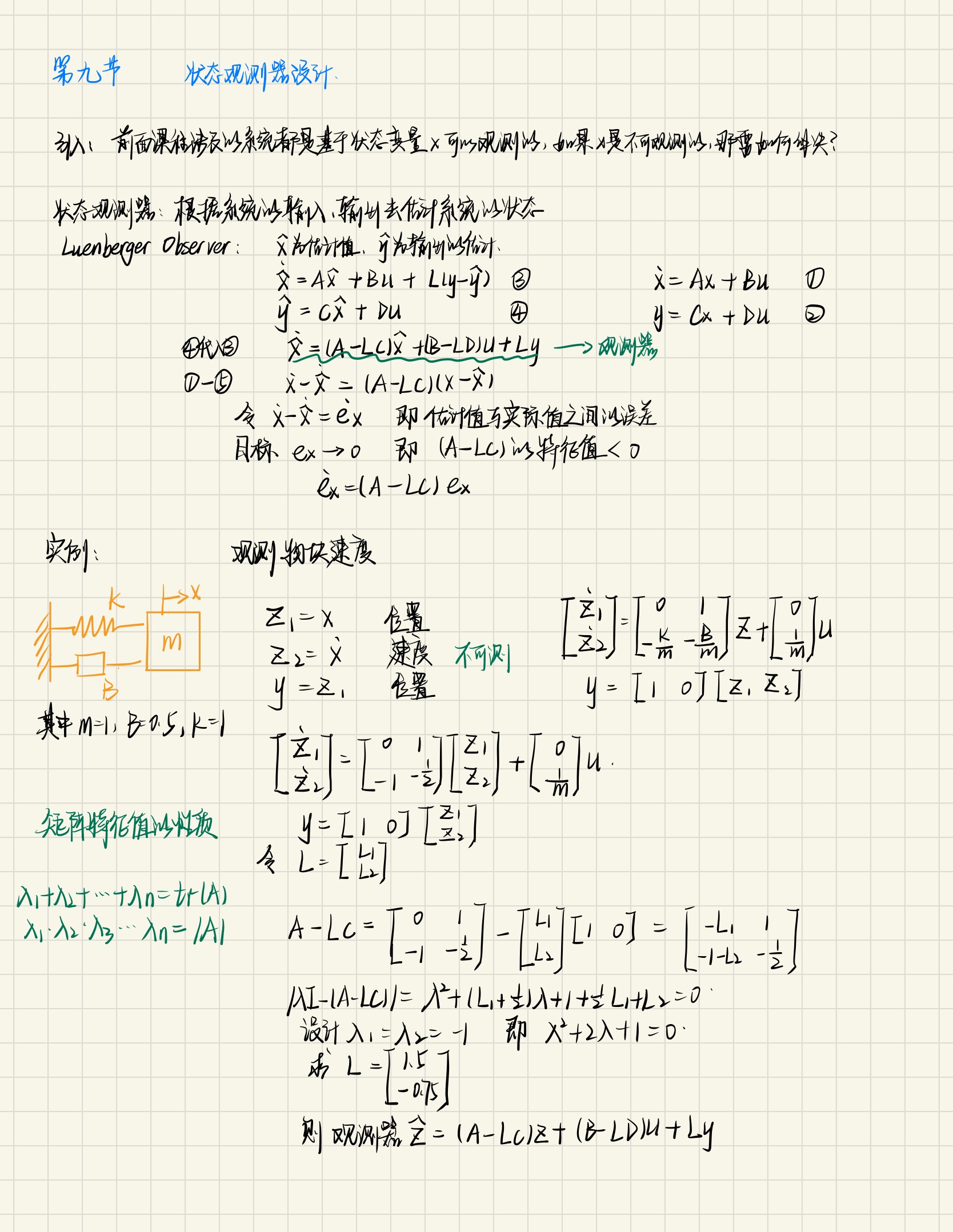
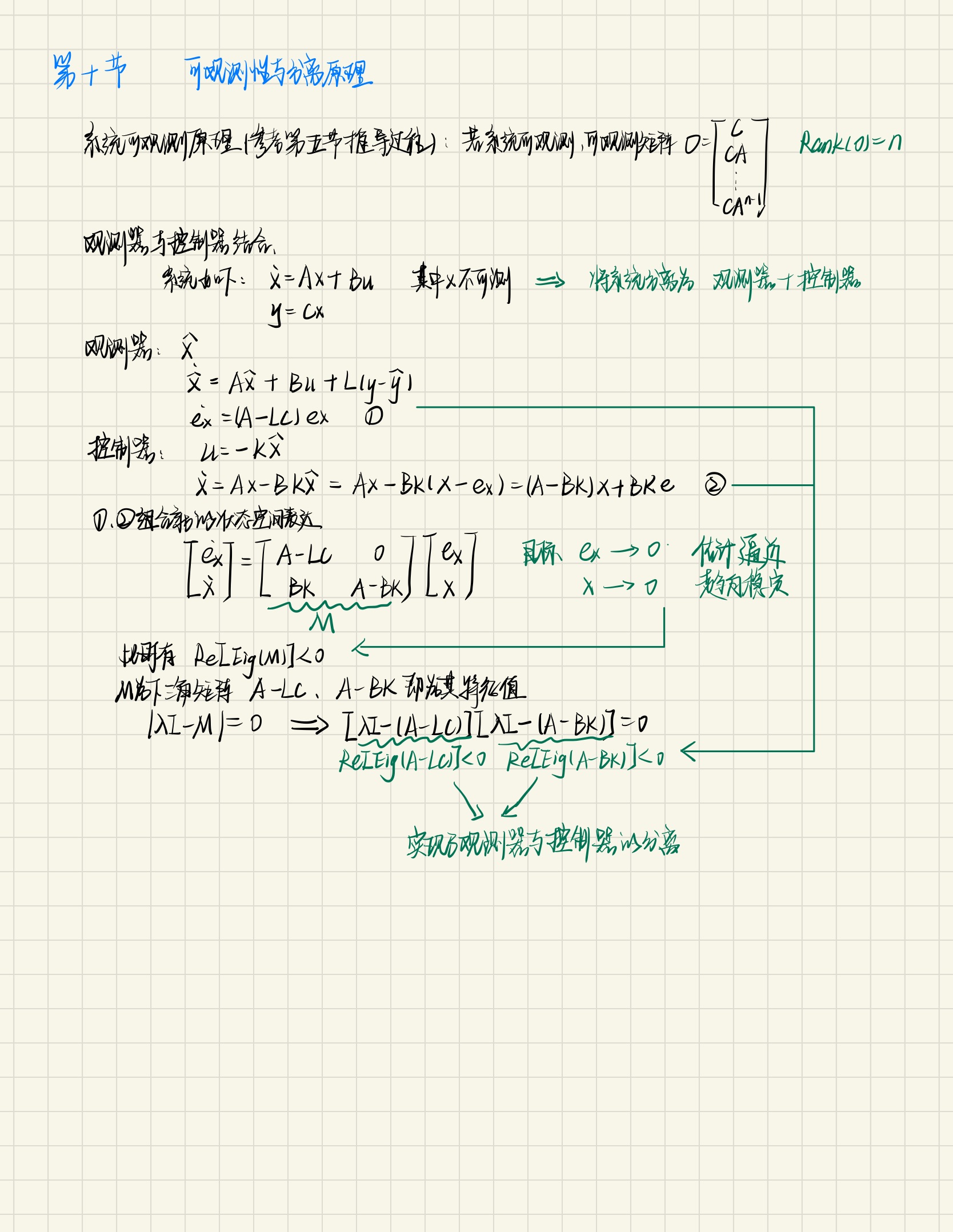
DR_CAN课程学习——现代控制理论 发表于 2022-02-03 本文字数: 105 阅读时长 ≈ 1 分钟 前言 基于B站UP主DR_CAN视频所作总结笔记 视频链接:DR_CAN——现代控制理论 状态空间 相图、相轨迹 爱情中的数学 系统的可控性 稳定性、李雅普诺夫定理 线性控制器的设计 LQR控制器 状态观测器设计 可观测性与分离原理 本文作者: AppZ99 本文链接: http://example.com/2022/02/03/DR-CAN课程学习——现代控制理论/ 版权声明: 本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!