前言
本系列主要基于《机器人SLAM导航——核心技术与实战》一书进行学习总结。
由于笔者本身不是从事硬件开发设计,故对其中部分硬件设计只做简要概括
简介
本篇作者从机器人传感器、机器人主机、机器人底盘对SLAM系统中硬件部分做了简要介绍,通过了解具体硬件的基本原理,能更好地去体会上层代码的设计思路,同时也为系统实际落地提供了思路。
机器人传感器
惯性测量单元
工作原理
测量方式通常为机械方式、光学方式、微机电方式。
加速度测量通常采用MEMS;利用高速旋转陀螺具有定轴性测量角速度,激光陀螺仪利用萨格奈克效应进行角速度测量;地磁通常采用霍尔效应进行测量。
原始数据采集
- 硬件电路搭建
- 固件驱动开发
- 上位机ROS驱动程序(发布ROS /imu话题)
参数标定
检测指标:
- 重复上电零偏影响
- 温度对零偏影响
- 震动对零偏影响
- 高冲击容忍度
- 非线性度
内参标定:
三计标定通常为轴偏差项、尺度偏差项、零偏差项对系统进行标定修正
标定模型改进:
除了三计自身,还包括外部因素来影响其标定效果,温度、重力、轴间敏感度、Allan方差
数据滤波
常见数据滤波:均值、滑动(解决均值输出延迟)、滑动中值滤波(剔除影响平均值的数据)、RC低通、FIR、IIR
姿态融合
主要涉及两个滤波算法:卡尔曼滤波、互补滤波 (注:后续专门总结一下这部分)
激光雷达
工作原理
测距原理: 三角测距(厘米级)、TOF(毫米级)
扫描原理: 单线、多线、固态、单线多自由度、面激光
性能参数
激光线数
测距频率
扫描频率
测距量程
扫描角度
距离分辨率
角度分辨率
使用寿命
数据处理
上位机ROS驱动程序: 发布ROS /scan话题,标准数据格式LaerScan(单线)、MultiEchoLaserScan、PointCloud2(多线)
扫描点的时间同步: 纯估计法(主要涉及ICP、VICP);里程计辅助法(通常里程计数据需要线性插值以便与雷达数据对齐)
相机
单目相机
无畸变内参模型:K为相机内参
径向畸变: 距离像素中心 $r$ 做三件泰勒近似
外参模型:T为相机在世界坐标系下的外参
上位机ROS驱动程序: 通常将数据发布ROS /
- usb_cam
- gscam(仅raw数据)
- 借助opencv自制驱动
相机标定: 查看ROS功能包camera_calibration
双目相机
深度信息获取原理:
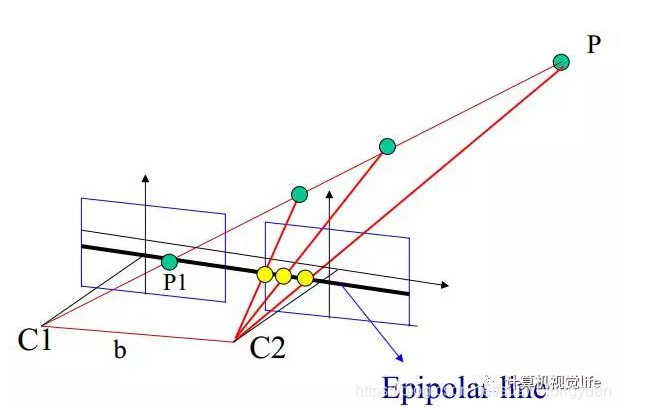
简化结果:
工艺原因,通常两个相机不能保持绝对平行
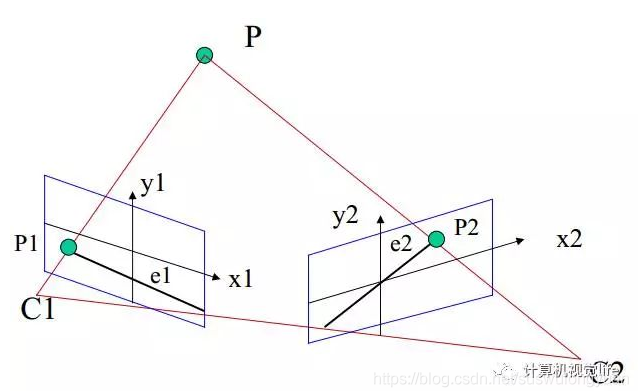
此时相机成像模型
对极几何约束:P点不在两者射线时,估计P在射线$C1P、C2P$ 的公垂线的中点
RGB-D相机
测距原理:三角测距、TOF
带编码器的减速电机
基本介绍
行星减速箱:相同减速比体积更小
编码器:霍尔、光电、碳刷
通信协议
rosserial是专门开发与外部数据串口通信的功能包
整体控制系统图如下:
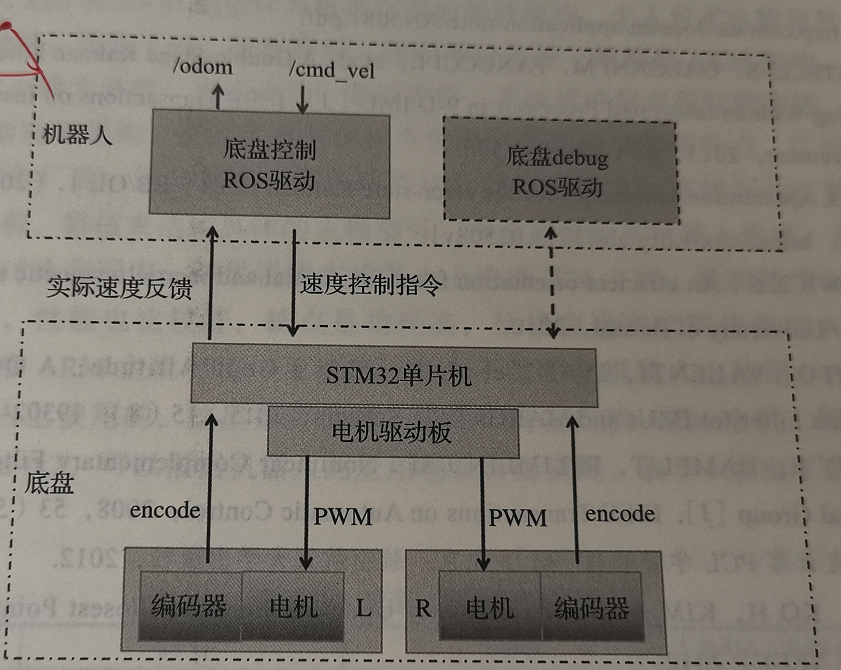
通常通过/odom、/cmd_vel两个话题分别发布里程计数据以及,速度控制信息。
机器人主机
树莓派
建议安装Ubuntu MATE,同时给定SWAP空间充当运行内存
实用设置
永久开启ssh
1 | sudo systemctl enable ssh |
USB外设绑定
创建绑定rules文件前的序号越大代表优先级越低,一般将优先级设定小一定,创建文件/etc/udev/rules.d/99-appz99-usb-serial.rules
1 | # appz99 |
(上面代码中1_1.3为**1-1.3,1.4同理)
KERNELS、idProduct、idVendor可以唯一确定设别
插入新设备用如下指令查看对应KERNELS、idProduct、idVendor
1 | udevadm info -a -p $(udevadm info -q path -n <devpath>) |
(注:
查看是否绑定成功
1 | ll /dev |grep ttyUSB |
(注:此处ttyUSB为事例)
ROS节点开机自启动
1 | sudo apt install ros-melodic-robot-upstart |
(注:myrobot为自启动任务的别名)
分布式通信
需要在网络下指定唯一MASTER
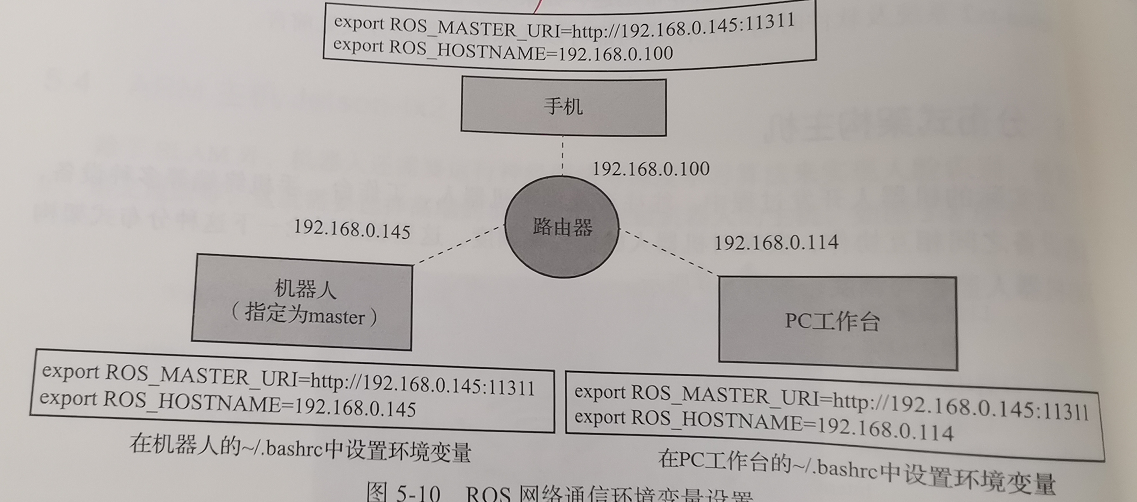
ssh本质:命令传递,所以启动不了机器人本地rviz
机器人底盘
底盘运动学模型
两轮差速模型
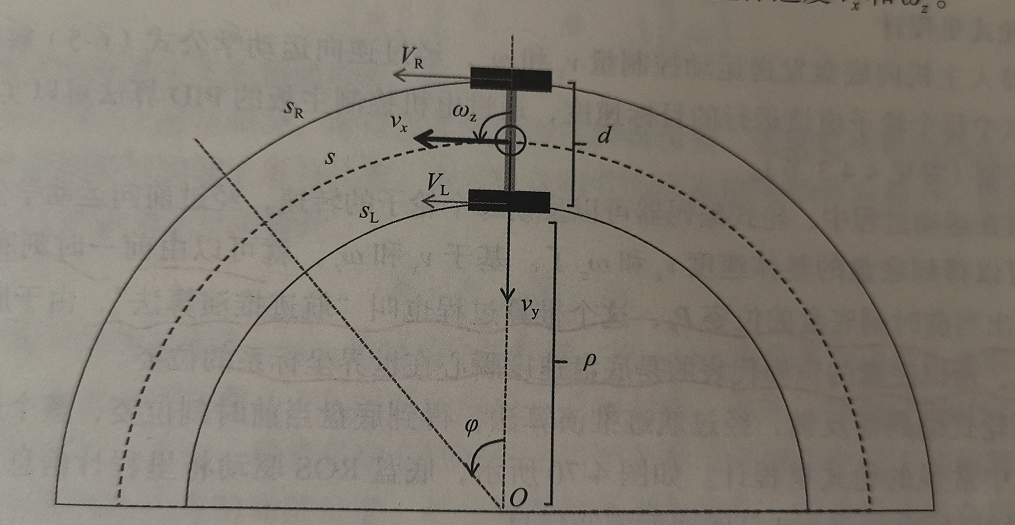
前向运动学: 根据上图建模可得
逆向运动学: 正向运动学求逆即可
轨迹推演:两轮差速不发生侧向滑动 $v_y = 0$
四轮差速模型
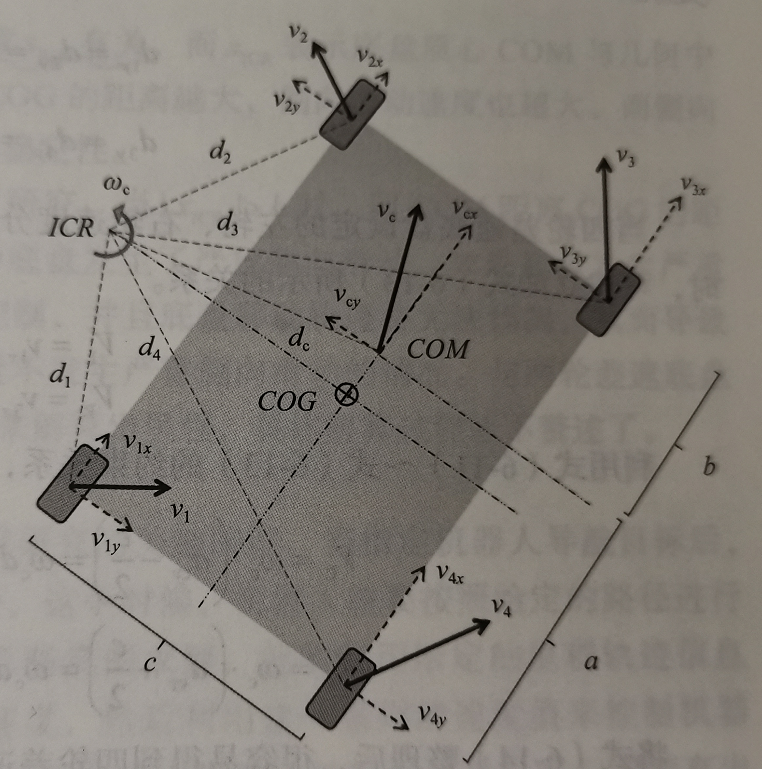
前向运动学: 根据上图建模可得
逆向运动学: 正向运动学求逆即可
航迹推演: 不能存在太严重的侧向滑动是上式成立的前提条件,若考虑侧向滑动,以COM建立右手坐标系,ICR的位置以$(x_{ICR}, y_{ICR})$表示,则有
侧向滑动速度与$x_{ICR}$ 有关
自转顺滑问题: 游中国比赛中关于四轮模型一直卡顿问题的解释
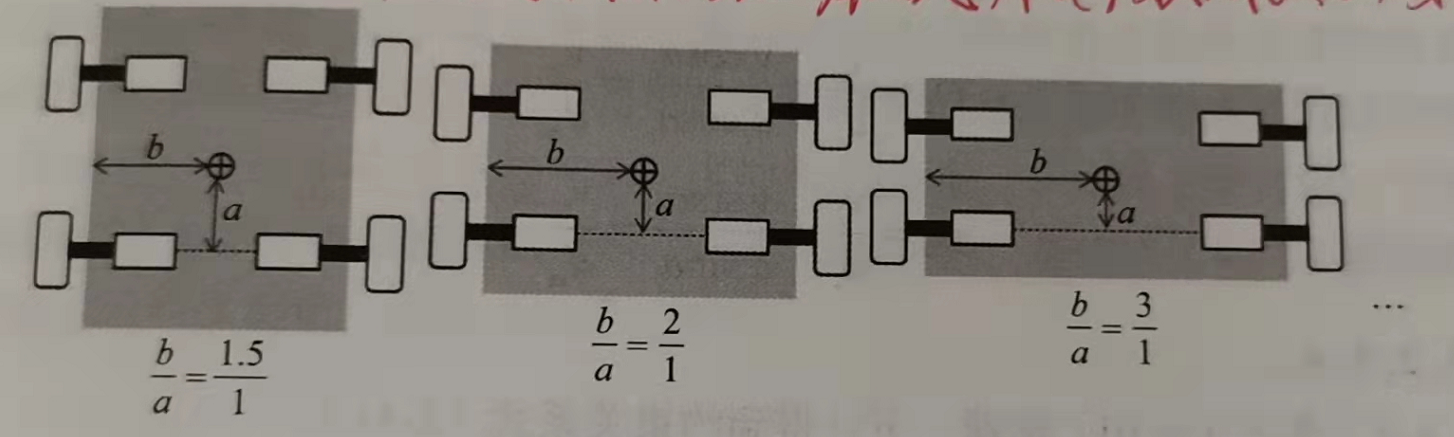
如何让四轮模型顺滑自转?
本质上四轮模型是可以等效为两轮差速模型(两轮差速可以很好地实现自转),上下两对轮子各自的瞬心如果无限接近,那么四轮模型就逼近两轮模型,那么车体侧向滑动就更小,本身自转也就更加顺滑。
阿克曼模型
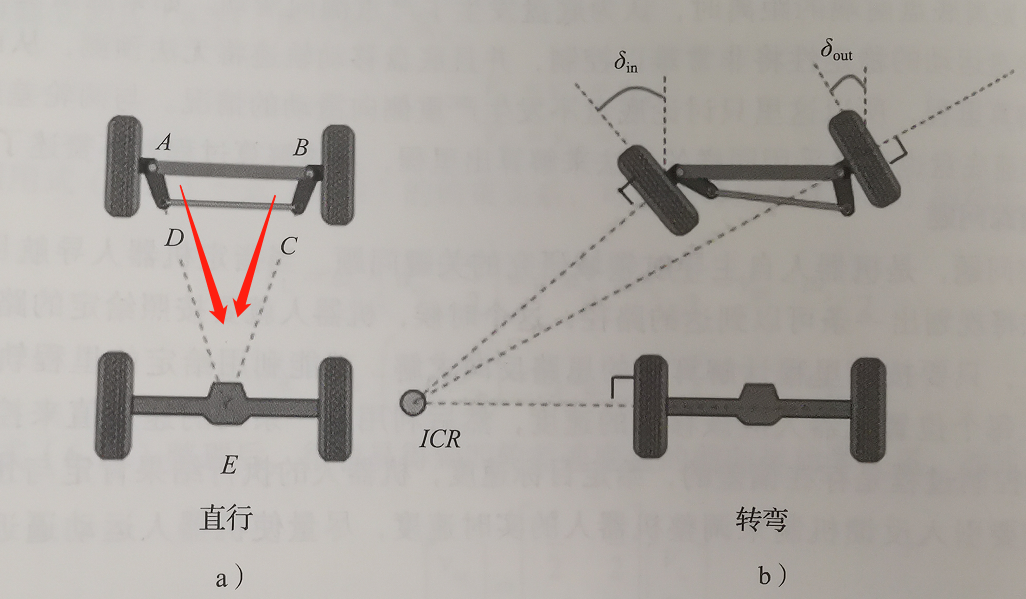
梯形四连杆:如上图a)所示,四连杆构成的等腰梯形是等腰三角型ABE的一部分
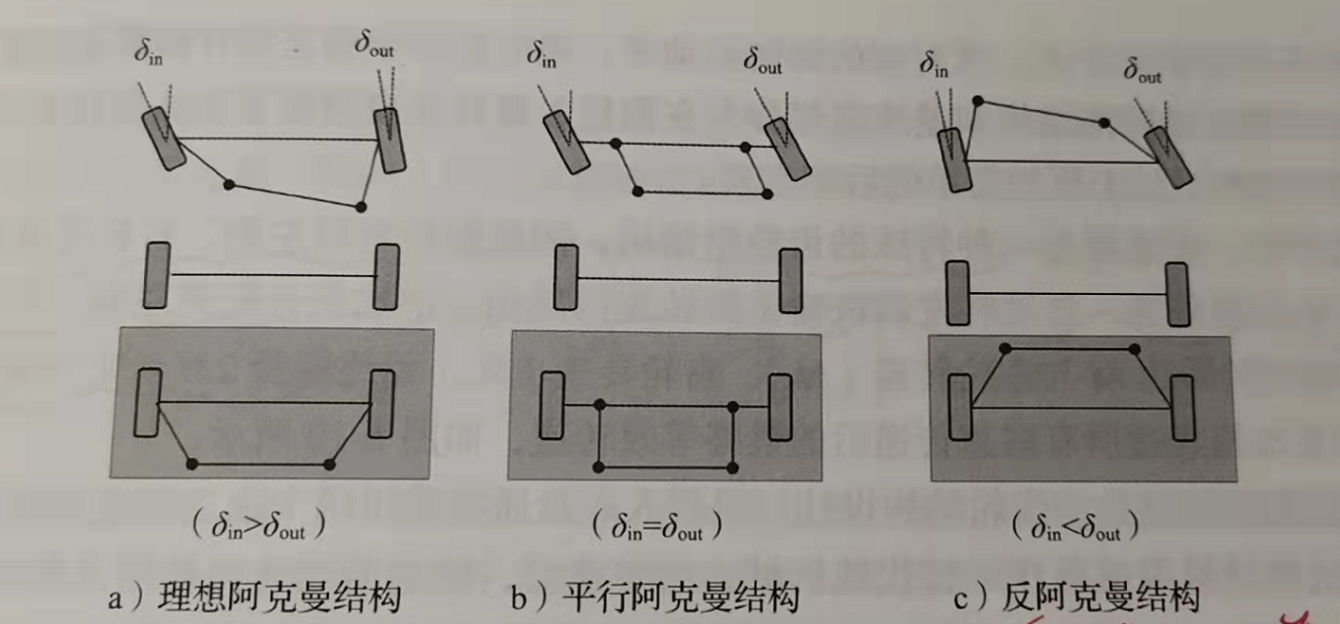
转向角设计: 过弯速度要求越高,则外轮转向角要越大(注:圆周运动)
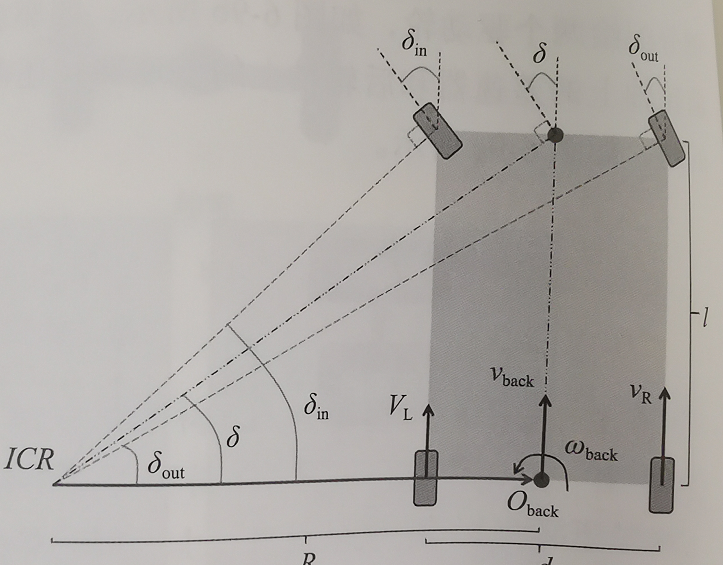
前向运动学: 根据上图建模可得
逆向运动学: 正向运动学求逆即可
中轴平均转向角
轨迹推演:无法原地自转,只能弧线逼近,ROS阿克曼社区
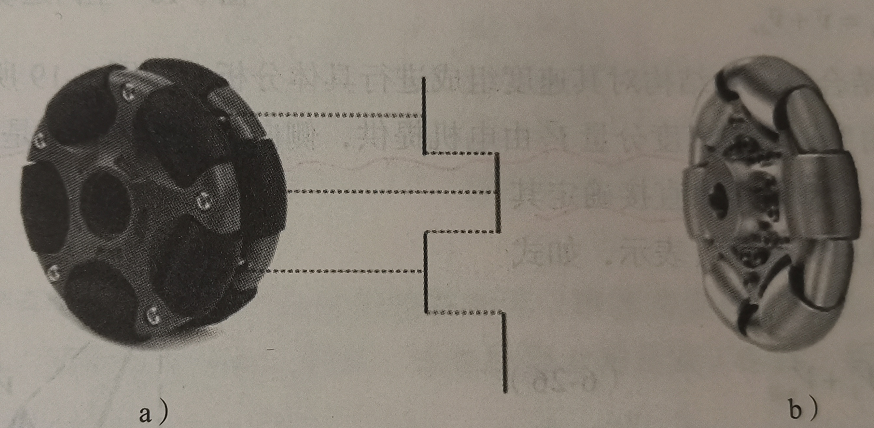
全向模型
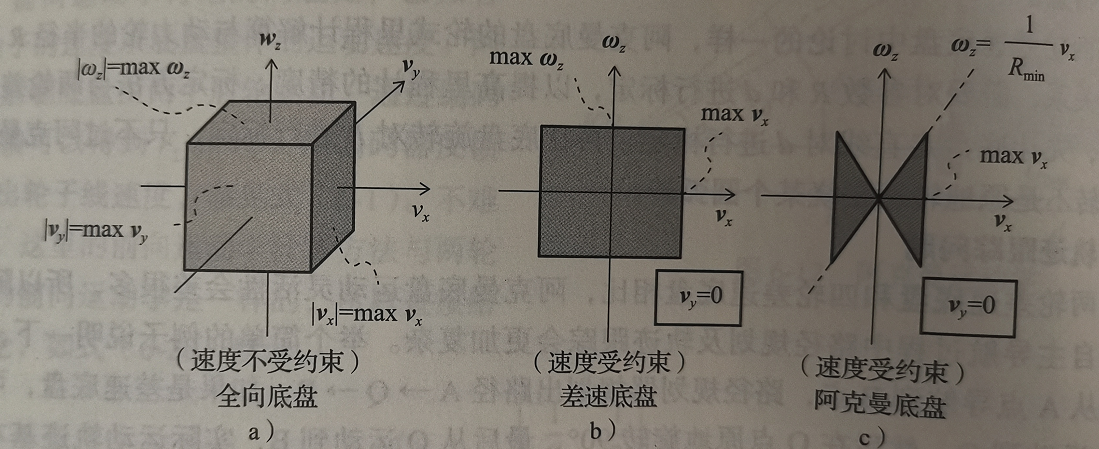
各个模型的约束条件
麦轮的限制
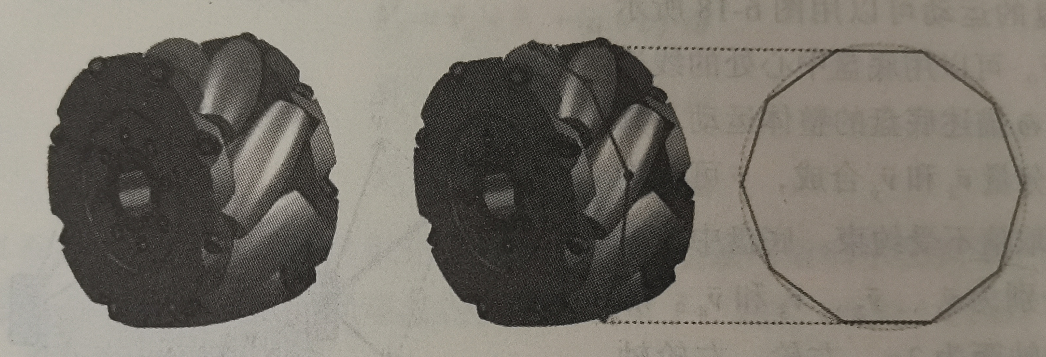
- 45°存在缝隙,运动过程车体会震动
- 双90°行走落地点成锯齿状
- 但90°目前最好的麦轮
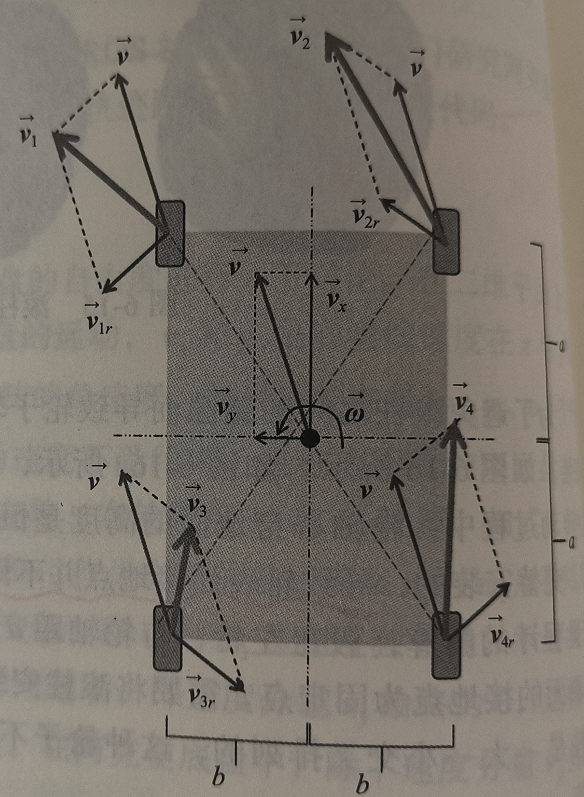
前向运动学: 根据上图建模可得
逆向运动学:正向运动学求逆即可
航迹推演: 任意方向都可运动
其他模型
- 双足
- 四足
- 多足
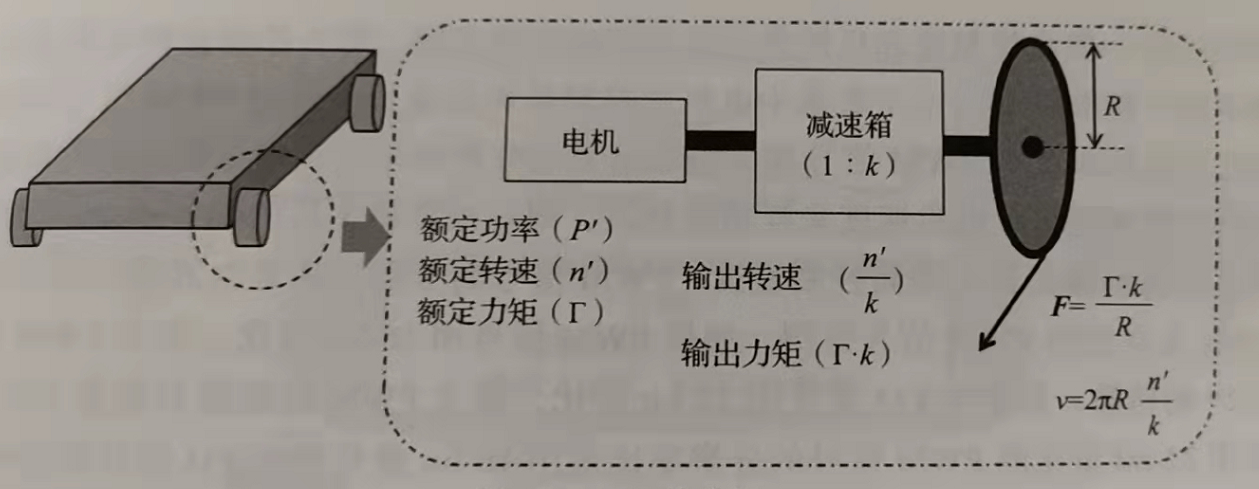
底盘性能指标
- 载重能力
- 动力性能
动力$F$ 与减速箱的参数 $k$ 成正比、与轮子半径 $R$ 成反比,轮子线速度$v$ 与减速箱参数 $k$ 成反比、与轮子半径$R$ 成正比。
- 控制精度
- 里程计精度
机器人底盘搭建
- 底盘运动学模型选择
- 传感器选择
- 主机选择
- 底盘硬件系统搭建
- 底盘软件系统搭建
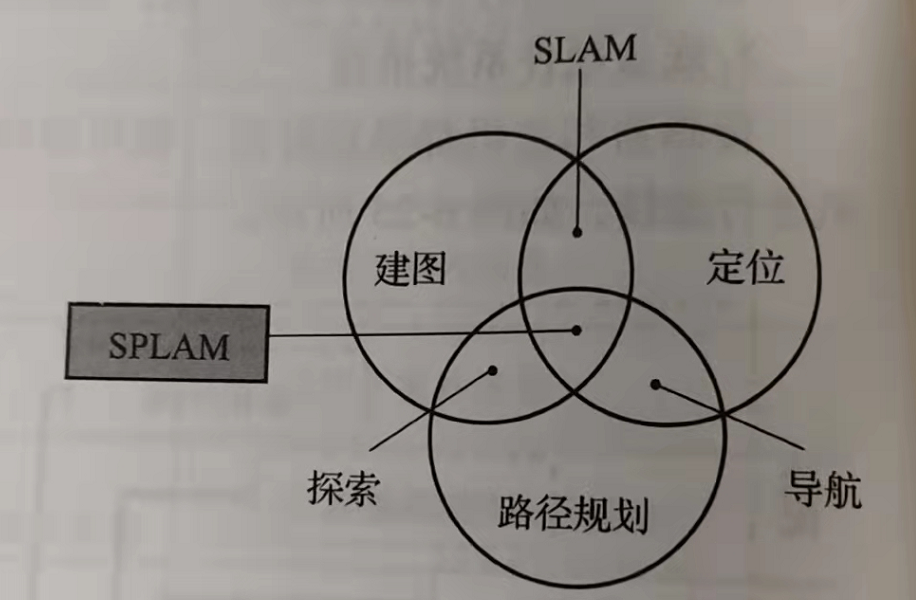
SLAM导航关系图