本文是近期阅读 3D Gaussian Splatting SLAM 相关论文的精度笔记。
本文主要关注各个 GS-SLAM 的实现方法。
一、GS-SLAM: Dense Visual SLAM with 3D Gaussian Splatting
摘要翻译
本文中,我们介绍了GS-SLAM,一种首先使用3D高斯表达的SLAM系统。它有助于更好地平衡效率和精度。以最近其他使用神经隐式表达的SLAM方法相比,我们的方法使用了实时可微分的抛洒渲染管线,它可以打打加快荼毒优化和RGB-D重渲染。具体来说,我们提出了一种自适应扩展策略,该策略添加新的或删除带有噪声的3D高斯,以有效的地重建新的观测场景几何结构并改进先前观测区域的建图。这个策略对于扩展3D高斯表达以重建整个场景而不是现有方法的合成静态物体是至关重要的。此外,在位姿跟踪线程中,我们设计了一种有效的由粗到精的技术去选择可靠的3D高斯表达来优化相机位姿,从而减少了运行时间并实现了鲁棒的估计。与Replica、TUM-RGBD数据集上现有的SOTA实时方法相比,我们的方法实现了具有竞争力的性能。源代码将会很快发布。
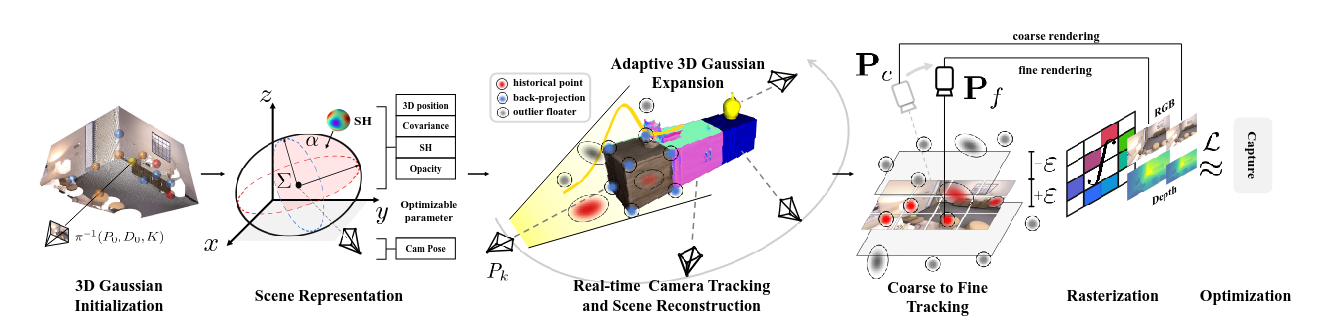
方法介绍
Overview